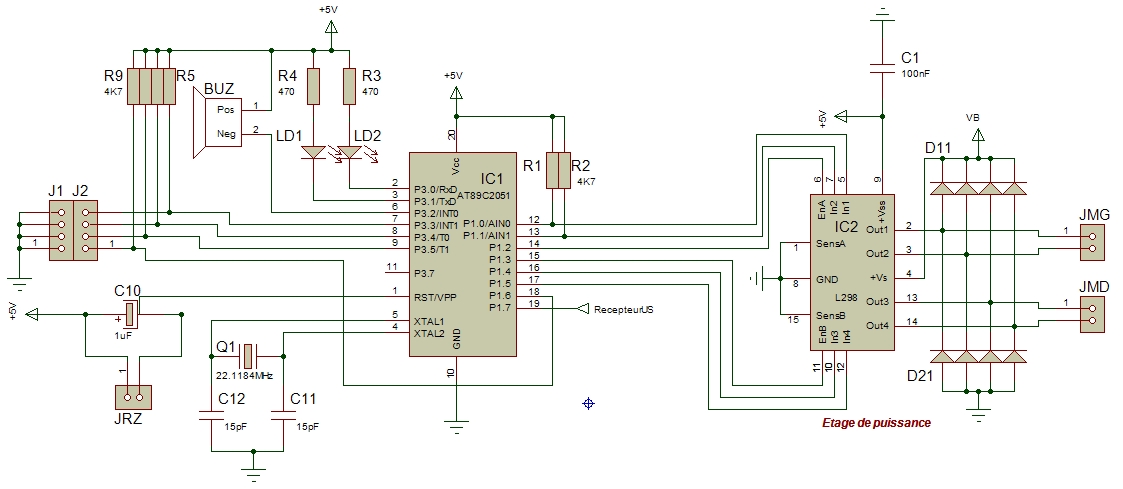
Le microcontrôleur choisi ici, est un ATMEL 89C2051.
Il est tout à fait possible d'utiliser un PIC ou tout autre type de microcontrôleur.La commande des moteurs est assurée par le circuit spécialisé L298 double
ponts en H.
Les moteurs utilisés ici, ne nécessitent pas de monter un dissipateur thermique sur le
L298.
Un buzzer permet de matérialiser de façon sonore une détection d'obstacle.
Un cavalier, positionné sur J1/J2 permet à l'utilisateur de faire un choix sur l'angle
de rotation du robot, lors de la détection d'un obstacle (30°,90°, 180°).
Une position de J1/J2 permet également de désactiver le buzzer.
Deux leds sont utilisées pour marquer le choix rotation gauche/droite.
|
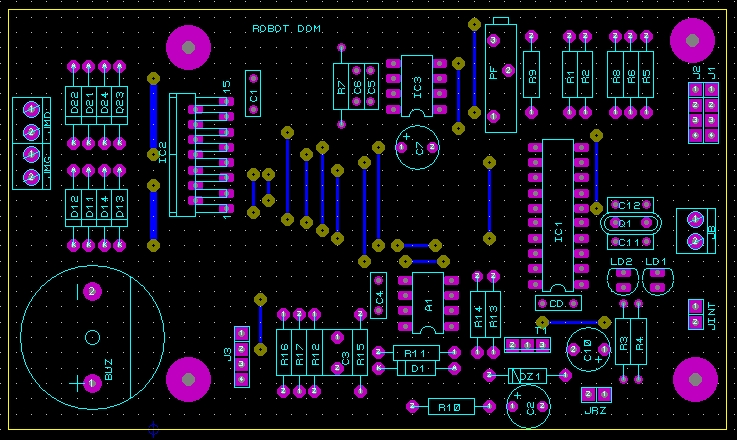
Toute l'électronique nécessaire au fonctionnement du robot tient
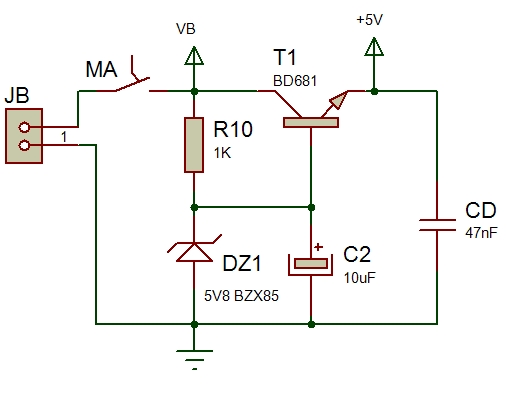
sur une seule carte 12x7cm, y compris émetteur et récepteur US.L'alimentation est réalisée à l'aide d'un transistor de puissance
associé à une diode zéner.
Cette technique permet de s'affranchir de la tension différentielle nécessaire au
fonctionnement d'un régulateur de type 78XX.
Quatre piles de 1,5V fournissent une tension égale à 6V (JB).
Les moteurs sont directement alimentés par le 6V batterie (VB) au travers du
circuit L298.
|