Si
nous augmentons la
fréquence du signal d'entrée, nous observons une
première limitation du système :
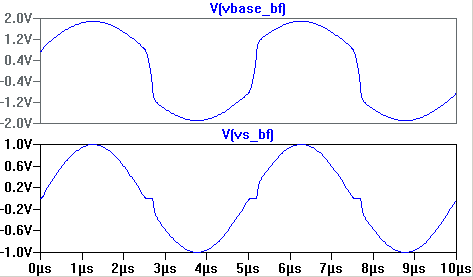
Comme
l'amplificateur met un temps fini pour passer d'un transistor à
l'autre, une distorsion apparaît sur le signal de sortie, cette
distorsion est caractéristique de ce type de montage.
Enfin,
la limitation
due aux tensions d'alimentations est indépassable :
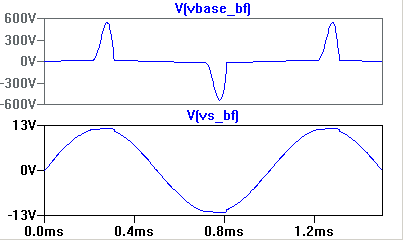
Si
on essaye de dépasser les douze volts d'alimentation,
l'amplificateur de commande a beau faire des efforts (en simulation
!) démesurés, il n'y a rien à faire.
La
réalité
se venge parfois.
