En
électronique
deux sources principales de non linéarités sont
rencontrées : la distorsion liée aux non
linéarités des caractéristiques des composants,
et la limitation due aux tensions d'alimentation des montages.
Autant
la première
catégorie de non linéarité est
améliorée
par le fonctionnement en boucle fermée, autant le second type
est incontournable, aucun système de réaction ne permet
de dépasser les limites imposées par les alimentations.
L'exemple
que nous
analyserons, dont un schéma de principe est donné
ci-dessous, est caractéristique des amplificateurs de
puissance dont les étages de sortie comportent des transistors
montés en « classe B ».
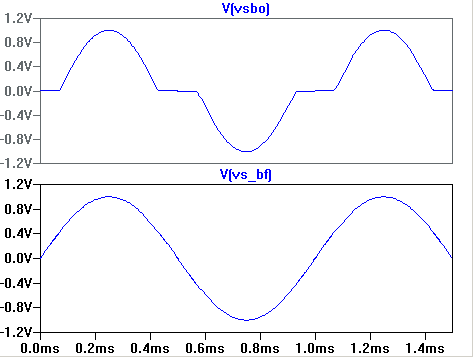
L'amélioration
apportée par la boucle fermée est spectaculaire, les
traces ci-dessous comparent le signal de sortie en boucle ouverte et
en boucle fermée, pour des amplitudes de sortie
équivalentes :
Il
est évidemment intéressant de se demander ce qui a
permis cette amélioration, l'observation du signal de commande
des transistors nous renseigne :
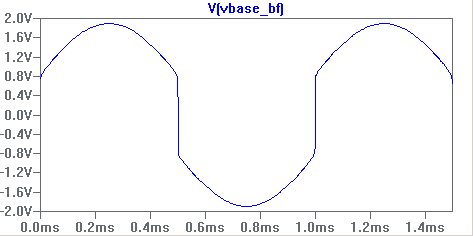
Pour
que le signal de sortie soit sinusoïdal, la commande ne l'est
pas, la tension appliquée aux bases est
« prédistordue »
pour compenser la non linéarité des composants.
