Comme nous l'avons déjà dit
précédemment, lorsqu'un
utilisateur se connecte sur le serveur web de l'IUT trois autres pages s'ouvrent :
- pilot.html
: la Télécommande permettant de faire
bouger le robot
- robotjpg.html : page
qui affiche le robot en 3 dimensions
- inputs.htm :
page se trouvant dans l'IPC et restituant l'état des
butées.
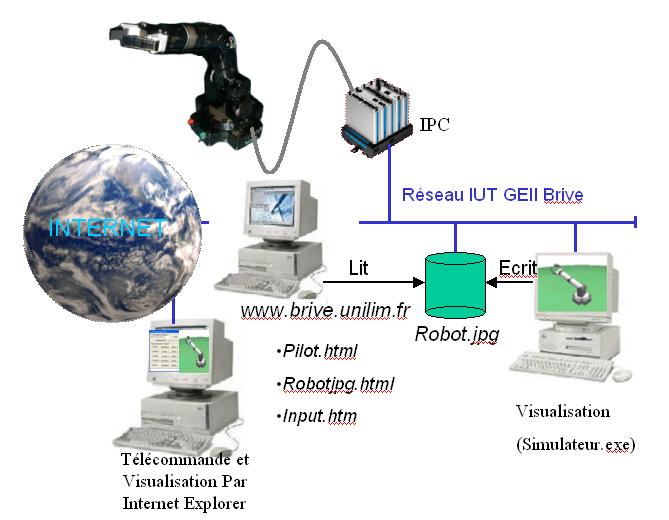
Architecture de l'application WEB
Plusieurs
éléments matériels et logiciels
composent notre application: un PC
Visualisation, inaccessible de
l'extérieur, exécute l'application
Simulateur.exe. Comme
précédemment, ce PC communique en UDP
avec l'IPC
pour construire l'image en 3D du robot, puis
il sauvegarde l'image 2D "Robot.jpg"
dans un dossier
accessible par le PC Serveur
(www.brive.unilim.fr). Ce dernier
insère alors l'image "Robot.jpg" dans la page HTML
"Robotjpg.html" qui
sera envoyée sur le PC de l'internaute connecté
à notre application.
