On suppose que les quatre constantes a, b, a' et b' sont différentes de 0.
A) Forme canonique
Afin de pouvoir étudier n'importe quel système avec le même formalisme, on va mettre l'équation du système sous sa forme canonique, c'est à dire une forme indépendante du système étudié.
Cette forme canonique sera : 
Pour obtenir cette forme, on commence par diviser l'équation par b :

Pour e et s constantes, s/e = K ; cette constante est appelée pour cela amplification statique.
Les termes s et t.ds/dt ajoutés devant être homogènes, t est donc homogène à un temps. Pour cela t et t' = l.t seront appelées constantes de temps du système.
B) Étude en régime harmonique
Lorsque le signal d'entrée est sinusoïdal de fréquence f = w/2π, le signal s est, en régime permanent, sinusoïdal de même fréquence; on dit alors que l'on est en régime harmonique. On peut donc étudier le système par la méthode complexe. L'équation canonique devient alors :
S.(1+j.t.w) = K.E.(1+j.l.t.w); la fonction de transfert du système est :  .
.
En posant fo = 1/t et f 'o = 1/l.t = fo/l, il vient :  .
.
On peut alors facilement tracer le diagramme de Bode asymptotique de T.
Son gain G = 20log (K+Gn) - Gd et sa phase j = jn - jd en supposant K positif; si K est négatif, on devra ajouter 180° à la phase.
On aura trois cas :
Si l = 1, T = K constante; le signal de sortie est proportionnel au signal d'entrée.
Si l < 1, f 'o > fo, étudions le diagramme de Bode asymptotique de T en faisant un tableau:
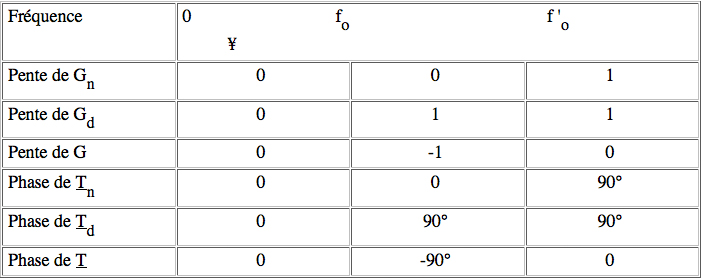
On voit donc que la phase sera négative ou nulle; le signal s sera donc en retard sur e.
Si l > 1, f 'o < fo, étudions le diagramme de Bode asymptotique de T en faisant un tableau:
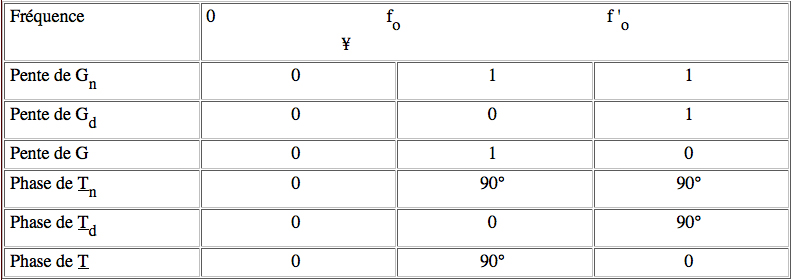
On voit donc que la phase sera positive ou nulle donc que le signal s sera en avance sur e.
La fig.2 donne le diagramme de Bode pour diverses valeurs du coefficient l. L'échelle logarithmique des abscisses est normée à la valeur x = f / fo. On a adopté la valeur K = 1.
Si La valeur est différente, on devra ajouter 20log (K) au gain et 180° à la phase si K < 0.
Si 
C) Réponse indicielle
Le système étant initialement au repos, on lui applique un échelon unitaire de tension : pour t < 0 e (t) = 0 et pour t > 0 e (t) = 1.
L'étude présente une difficulté car de/dt n'est pas définie en t = 0; pour tourner cette difficulté, envisageons d'abord une montée progressive de e suivant la fig.3.a. 
Pour 0 < t < to , e (t) = t/to et  La solution générale de l'équation sans second membre est
La solution générale de l'équation sans second membre est  ; la solution particulière est de la forme s2 = a.t + b.
; la solution particulière est de la forme s2 = a.t + b.
Pour t > to, e (t) = 1 donc :  La condition initiale s = So donne :
La condition initiale s = So donne :

Pour retrouver l'échelon idéal, nous faisons tendre to donc x vers 0.
 .
.
La réponse à un échelon est obtenue en remplaçant So par cette valeur et  :
: 
En régime permanent on aura s (t) = K = Cste.
La fig.3b donne l'allure de y = s (t)/K en fonction de u = t / t.
Décrivons quelques propriétés des graphes :
Pour l = 1, s (t) =K.e (t) en permanence
s (0+) = K.l ; si l > 1, s (t) dépasse la valeur finale pour t ® ¥ , s (t) ® K.
Le temps de réponse à 5 % est le temps au bout duquel le régime permanent est atteint à 5 % près, c'est à dire au bout duquel 0,95.K £ s (t) £ 1,05.K.
Il vient : 
pour t = t, s (t) = K.[1+0,63.(l-1)] la tangente a pour pente :  ; la tangente à l'origine a donc pour équation
; la tangente à l'origine a donc pour équation  ; elle coupe la valeur finale K au point T d'abscisse t = t.
; elle coupe la valeur finale K au point T d'abscisse t = t.
D) Réponse à une rampe unité
On applique à l'entrée, le signal e (t) = 0 pour t < 0 et e (t) = t pour t > 0.
Il vient :  ; la solution générale de l'équation sans second membre est
; la solution générale de l'équation sans second membre est
s1 =  ; la solution particulière de l'équation complète est de la forme s2 = a.t + b;
; la solution particulière de l'équation complète est de la forme s2 = a.t + b;
t.a + a.t + b = K.t + K.l.t soit par identification : a = K et t.a + b = K.l.t soit b = K.t.(l-1)
La solution générale est donc :  .
.
En régime permanent, la réponse est la droite : K.[t + t.(l-1)]; au coefficient K près, on retrouve l'entrée avec un écart t.(l-1) appelé erreur de traînage.
E) Identification
Identifier un système c'est déterminer expérimentalement ses constantes.
Pour un système du premier ordre la réponse indicielle permet de déterminer :
L'amplification K égale à la valeur de s (t) en régime permanent
La constante l par s (0+) = K.l
La constante de temps t par s (t) = s (t) = K.[1+0,63.(l-1)
