Nous allons étudier ces représentations grâce à l'exemple d'ordre 4 vu au paragraphe 5.3.
Première représentation d'état (voir au paragraphe 5.3 le schéma de matérialisation issu du premier graphe canonique).
On a donné un nom à la sortie de chaque intégrateur: zk(t).
Le système étant d'ordre 4 on a 4 variables internes qui constituent ce qu'on appellera un « vecteur d'état ».
L'entrée d'un intégrateur correspond à la dérivée de sa sortie. Ainsi à partir du schéma on peut écrire:
z'1 = - 1,2.z4 + 0,4.x z'2 = z1 - 2,78.z4 - 2,38.x z'3 = z2 - 3,12.z4 + 2.x z'4 = z3 - 2,7.z4 + 3.x y = z4 .
Deuxième représentation d'état (voir le schéma de matérialisation issu du second graphe canonique au paragraphe 5.3). Bien sûr on a pris les mêmes notations pour les variables internes (variables d'état), mais elles ne sont pas les mêmes que précédemment. Ici on peut écrire:
z'1 = z2 z'2 = z3 z'3 = z4 z'4 = - 1,2.z1 - 2,78.z2 - 3,12.z3 - 2,7.z4 + x
y = 0,4.z1 - 2,38.z2 + 2.z3 + 3.z4 .
Ci-dessous sont données les deux représentations d'état (vecto-matricielle).
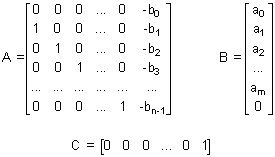
Première représentation d'état: |  |
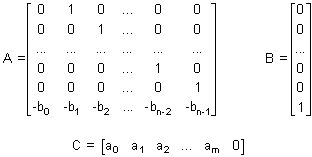
Seconde représentation d'état: |  |
Généralisation:
On peut représenter le fonctionnement d'un système linéaire d'ordre n par deux équations vecto-matricielles en introduisant un vecteur d'état z à n composantes:
avec A = matrice d'état (n lignes, n colonnes) B = matrice d'entrée (n lignes, 1 colonne) C = matrice de sortie (1 ligne, n colonnes).
Soit T(p) la fonction de transfert générale
d'un processus avec bn = 1: |
 |
Première représentation d'état: |
Seconde représentation d'état: |
 |
 |
La résolution du système de deux équations vecto-matricielles consiste à diagonaliser la matrice d'état. Le logiciel Matlab effectue ce travail en une toute petite fraction de seconde !

