6. Instrumentation et banc de test du vélo électrique
Nous avons choisi des moteurs arrières car en plaçant le vélo sur un galet ([1], figure 4), il est possible de recharger les batteries avec la force musculaire.
Nous avons placé sur ce galet une génératrice qui permet de tester le moteur ([3], figure 4).
Une instrumentation embarquée permet de mesurer respectivement tension, vitesse, courant, énergie en A.H, par l'intermédiaire d'un afficheur LCD qui affiche la réserve d'énergie ([2], figure 4) et que l'on peut observer sur la figure suivante :


Fig 4 : Banc de mesure et afficheur LCD
On peut mesurer les régimes transitoires du vélo, vitesse et courant batterie en fonction du temps avec un oscilloscope, ou une pince watt métrique enregistreuse.
Pour contrôler le moteur du vélo, il y a plusieurs stratégies :
- la limitation du courant moteur seulement ou des temps d'accélération et de décélération comme dans exemple du paragraphe 3,
- la régulation de la vitesse et limitation du courant moteur,
- la limitation du courant sortant de l'accumulateur et limitation de la vitesse.
La première solution permet d'avoir une force motrice constante mais il y a une pointe de courant de batterie importante.
La deuxième stratégie permet de gérer facilement un capteur de sécurité sur le pédalier comme indiqué ci dessous :
- S'il y a un pédalage nulle ou très faible entre 0 à 0,1 tr.s-1, le moteur est en roue libre quelque soit l'action de la manette accélératrice. Donc, la consigne de vitesse sera à 0 km/h.
- S'il y a un pédalage faible entre 0,1 à 0,15 tr.s-1, même si la manette est à 100%, la consigne ne sera que de 13 km/h permettant d'accélérer mais pas d'aller vite.
- S'il y a un pédalage supérieur à 0,15 tr.s-1, la consigne de vitesse sera un % de la poignée accélératrice.
- un freinage électrique s'établira seulement avec la manette à 0%, au dessus d'une certaine vitesse de 13 km/h. En dessous de cette vitesse, le moteur sera en roue libre
On peut observer le fonctionnement de cette stratégie sur la figure 5.
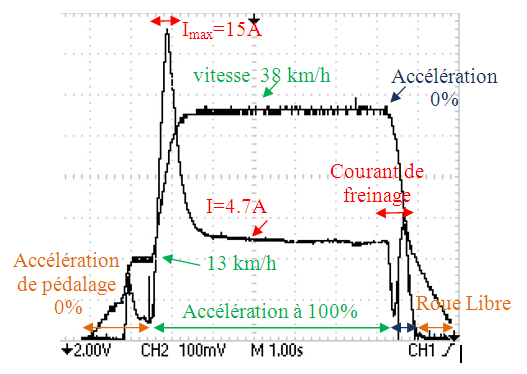
Fig 5 : Vitesse et courant batterie en fonction du temps sans charge (FR=23 N, masse de la roue 7kg)
On retrouve approximativement les temps d'accélération et décélération avec les équations (5) et (10) en utilisant le banc de charge :
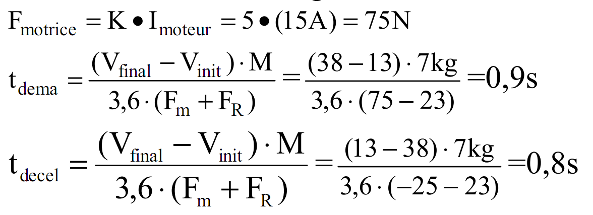
Avec le banc de charge, la masse correspond à celle du moteur et non plus celle du cycliste comme sur la figure 5.
La troisième stratégie permet de limiter le taux de décharge de la batterie. Par conséquent, la puissance au démarrage est constante.
On peut observer sur la figure 6 l'utilisation de la 3éme stratégie sans capteur de pédalier avec un courant limité de la batterie à 40 A max pendant 0,3 s puis à 20A.
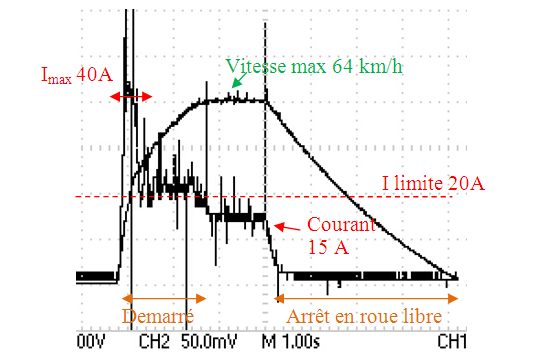
Fig 6 : Vitesse et courant batterie en fonction du temps sans charge (FR=23 N, masse de la roue 7kg)
Les temps accélérations sont paramétrés à 0,1s donc ils ne sont pas pris en compte car c'est le paramétrage du courant maximal de la batterie qui minimisera les accélérations. Cette figure permet d'observer ces limitations de courant ainsi que le courant en régime établi de 15A lorsque la vitesse a atteint 64 km/h avec un accumulateur de 50V.
La figure 6 permet d'observer la vitesse en fonction du temps, donc de déterminer l'accélération. Celle-ci est importante pour 40A (33m.s-2), puis plus faible (5m.s-2) avec le courant limité à 20A.
Enfin on peut observer l'arrêt en roue libre donc sans
régénération.
Lorsque le courant de la batterie est limité, le vélo fonctionne à puissance moteur constant Pm limit.
Pour connaitre les dynamiques du vélo, il faut donc résoudre l'équation différentielle suivante :
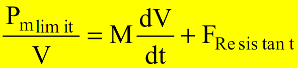 (15)
(15)
En négligeant la force résistante, la résolution de l'équation (15) donne la dynamique de vitesse et du déplacement correspondant aux equations suivantes :
 (16)
(16)
 (17)
(17)
Au démarrage, si on limite la puissance à 1400W, correspondant à la
puissance moyenne de la figure 3 lors de l'accélération, il faudra aussi 4 secondes pour atteindre la vitesse de 36 km/h ou 10 m/s. L’énergie consommée sera donc identique pour les 2 commandes.
Mais avec la commande à puissance constante, la distance parcourue sera de 27 m à la place de 20m. En effet, la vitesse en fonction du temps et à puissance constante est supérieure à force motrice constante comme on peut l’observer sur la figure 7.
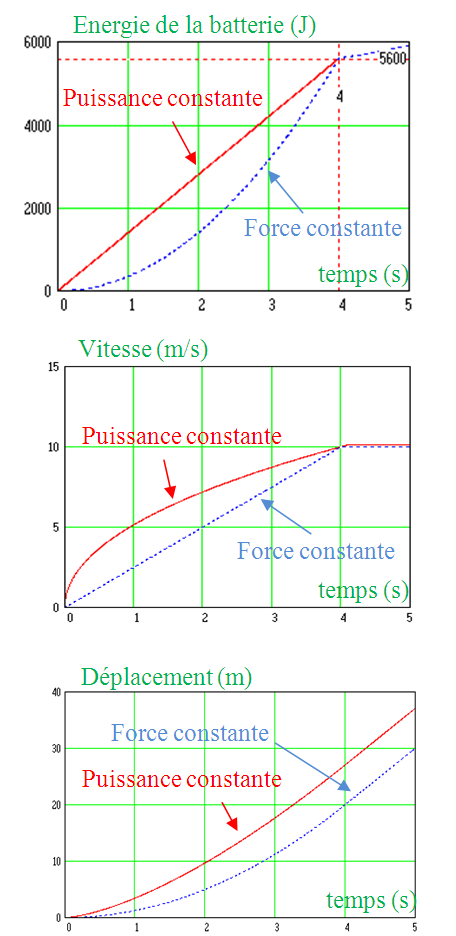
Fig 7 : Energie, vitesse et déplacement en fonction du temps, pour la commande à puissance constante et à force constante
avec une charge de 30 N
Donc, les dynamiques du vélo avec la troisième stratégie est plus importante. De plus avec la puissance constante, le courant de la batterie est constant à 28A pendant toute l’accélération et n’atteint plus 56 A. Par conséquent, il y a une sollicitation en courant de la batterie bien plus faible.
On a démontré en ayant faits quelques mesures qu'il était facile d'identifier tous les paramètres d'un vélo électrique (puissance, consommation, dynamique...) et de comprendre les limites dynamiques du vélo électrique. Les constructeurs moteurs et variateurs fournissent très peu d'information, il faut donc un minimum d'investissement de l'enseignant pour une exploitation pédagogique.
Pour mettre en commun les études de chacun, nous avons décidé de créer un challenge pédagogique de vélo électrique en parallèle au karting électrique à Vierzon. Ce challenge permettra de mettre en ressources des données afin d'aider toutes personnes désireuses de réaliser un bon vélo électrique.