Carte
d'Interface et Capteurs
de positions
Les Entrées
Analogiques
Les Entrées analogiques de l'IPC se font par
l'intermédiaire du module IO40.
Cette
carte permet l'acquisition de 4 voies 0-10 Volts. La conversion Analogique/Numérique se
faisant sur 12 bits, la valeur maximale est 4095 (212-1).
cette valeur est obtenue pour une tension proche de 10V.
Sur
le robot nous avons fixé de
simples potentiomètres sur l'articulation du coude et du socle.
Les sorties des potentiomètres vont sur deux entrées
de la carte IO40 par l'intermédiaire d'un câble. En
tournant, l'articulation modifie
la
valeur de la résistance variable, ce qui modifie la tension de
sortie du potentiomètre proportionnellement à son
angulation, comme le montre la figure ci-dessous.
Les articulations ont une plage angulaire
limitée entre un angle Min et un angle Max. Cette plage de
fonctionnement est représentée en vert. La droite
verte représente la fonction qui permet de calculer l'angle
courant de
l'articulation à partir de la valeur numérique de la
tension. Cette droite est plus ou moins pentue et dépend de la
valeur de la résistance variable. Pour le coude nous avons
monté un potentiomètre de 10Kohms
Fonction
retournant l'angle de
l'articulation à partir d'une
tension numérique
|

|
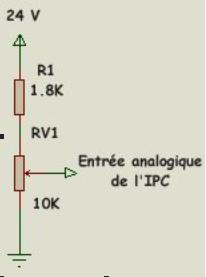 |
| Le
potentiomètre monté sur le coude |
Son schéma
de
montage |
