Il est très facile de travailler dans le monde symbolique, mais il est plus difficile de revenir dans le monde réel et pourtant c'est parfois nécessaire. Si ce n'est pas indispensable, on évite ce travail souvent long et fastidieux.
La transformation inverse consiste donc à trouver la fonction du temps f(t) correspondant à l'originale d'une fonction F(p) qui a été élaborée par des opérations simples dans le monde symbolique: f(t) = L-1 F(p).
Trois méthodes s'offrent à nous, mais seule la dernière sera exploitée.
2.8.1 Transformée de Mellin-Fourier
C'est vraiment pour les « matheux » !
2.8.2 Méthode des Résidus
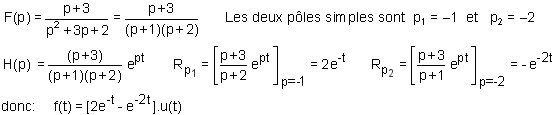
Pour chaque pôle de la fonction H(p) = F(p).ept il existe un "résidu". Les pôles de F(p).ept sont les pôles de F(p).
F(p) se met sous la forme d'un rapport: F(p) = n(p)/d(p). Les pôles de F(p) sont les valeurs de p qui annulent d(p).
Supposons p1 un des pôles de F(p). Pour ce pôle il existe un résidu Rp1:
Si p1 est un pôle simple, on a Rp1 = (p - p1).H(p1)
Si p1 est un pôle double, on a Rp1 = (p - p1)2.H'(p1) avec H'(p) = dH(p) /dp
Si p1 est un pôle multiple d'ordre k, on a Rp1 = (p - p1)k.H(k-1)(p1) / (k-1)! avec H(k-1)(p) = dk-1H(p) /dpk-1
Pour obtenir f(t) il suffit alors de faire la somme des résidus: f(t) = S [Résidus de H(p)]
Exemple:
Bien sûr toutes les fonctions du temps que nous trouvons sont considérées nulles avant l'origine du temps, c'est pourquoi on multiplie la fonction par u(t) pour exprimer f(t) en toute rigueur.
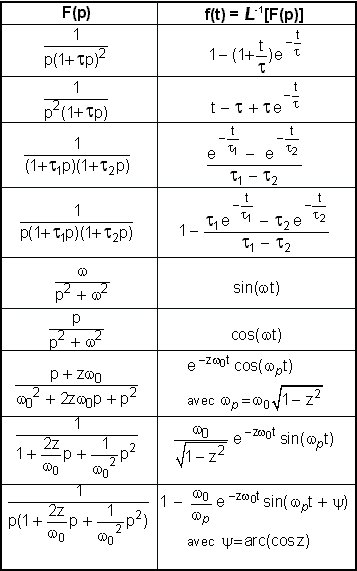
2.8.3 Table de Transformées de Laplace
C'est grâce à cette table que nous pourrons exprimer les fonctions du temps sans trop de calculs.
Cette table est présentée à la page suivante. Elle est parfaitement adaptée à nos besoins en Automatique. Evitez d'utiliser une autre table qui renfermera des éléments inutiles et qui ne donnera pas les fonctions sous leur forme canonique.
Pour les fonctions F(p) compliquées il faudra faire une décomposition de cette fonction en une somme d'éléments simples puis prendre l'originale de chaque élément afin d'en faire à nouveau la somme.
Il est préférable d'exprimer une exponentielle en faisant apparaître la valeur de la constante de temps t plutôt que son inverse a. En effet nous montrerons au chapitre suivant que la durée de vie de cette exponentielle est égale à 7 fois t. Ceci nous oblige à mettre F(p) sous une forme canonique en mettant toutes les constantes en facteur.
Par exemple on transformera (3p + 2) en 2(1 + 1,5p). La valeur 1,5 représente alors la constante de temps (1,5 s) de l'exponentielle qui interviendra dans la fonction f(t). Ainsi on sait qu'au bout de 7 x 1,5 soit à peu près 10 secondes, l'exponentielle sera nulle.
Table de Transformées de Laplace
Remarque: Il est sous-entendu que toutes les fonctions du temps sont multipliées par u(t), c'est-à-dire qu'elles sont nulles avant l'instant initial t = 0.