Une qualité essentielle et
surtout indispensable pour une boucle est sa stabilité. Une définition simple
de cette propriété est la suivante.
Définition : Un système est
stable si écarté de sa position d’équilibre après un régime transitoire il
revient à sa position initiale.
Dans la figure ci-dessous sont
tracées trois évolutions possibles pour des systèmes linéaires : stable et
instable de type système oscillant, et oscillateur « parfait » :
cas limite stable et instable (une moindre variation de paramètre système
entraîne soit un état stable, soit un état instable).
Les trois comportements
qualitatifs en stabilité d’un système linéaire :
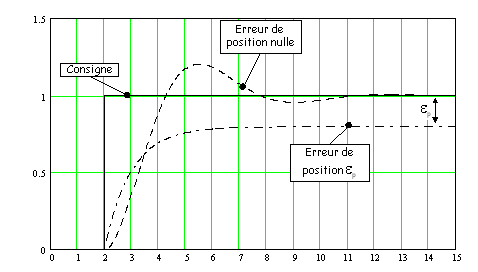
Pour une boucle stable, il est
naturel de vouloir contrôler en régime permanent l’écart existant entre la
consigne et la grandeur de sortie réglée ou l’influence d’une perturbation sur
la sortie. Cette qualité est la précision qui est différente suivant la
nature de la variation de consigne ou de la perturbation. Classiquement,
l’erreur statique (ou de position) est la première considérée (voir figure
ci-dessous). Les erreurs dynamiques de vitesse et d’accélération font partie
des qualités et des performances imposées pour un cahier des charges pour la
réalisation d’un asservissement.
Précision statique d’un système
en rapport avec une variation de consigne :
Une façon d’évaluer la rapidité
est l’utilisation de la notion de temps de réponse à
x % qui est le temps que
mette la mesure pour entrer définitivement dans une zone encadrant à
 x
x % la valeur finale. Au sens du
cahier des charges, les valeurs 5% et 1% sont les plus courantes.
Ces trois propriétés de base
comme en général dans le monde de la physique sont souvent contradictoires au
sens des objectifs, toute l’habilité de l’automaticien sera d’établir un
compromis de réglage de la boucle étudiée en régulation et/ou en
asservissement.