Ce projet nous a
permis d'étudier et de mettre en
pratique les différents protocoles de communication
utilisés sur le réseau mondial INTERNET: TCP,
UDP,
HTTP à travers plusieurs matériels (PC et
Automate) et les différents langages associés.
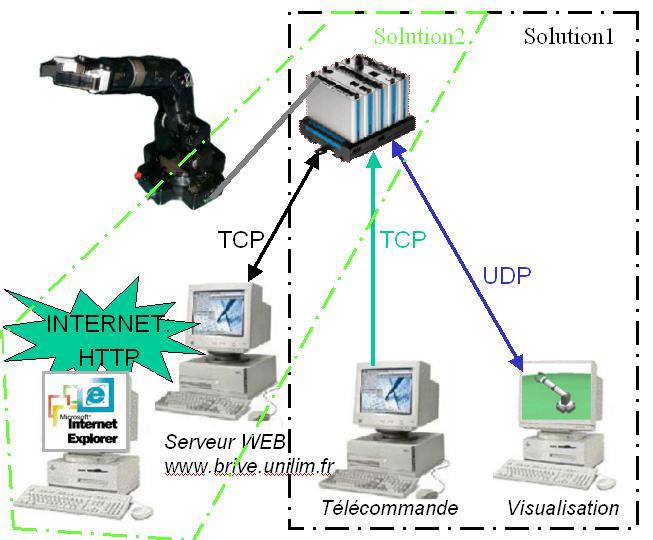
Solution :
Sur le
réseau local de notre établissement, un PC
"Télécommande"
envoie un mot de commande
à l'IPC
pour piloter le bras manipulateur, en utilisant le protocole
TCP/IP. Le robot bouge en fonction de la valeur du mot de
commande, ce
qui modifie les valeurs de ses capteurs de position.
Un PC
"Visualisation", interroge cycliquement l'IPC, pour
récupérer ces valeurs de positions afin
d'afficher en 3D
le robot. Cette communication utilise le protocole UDP.