Beaucoup
de systèmes
réels présentent un retard entre l'entrée et la
sortie du système. L'exemple introductif d'une installation de
chauffage d'immeuble en est un exemple caractéristique. Pour
qu'une augmentation de la puissance de la chaudière puisse se
manifester dans une pièce, il faut que l'eau qui circule dans
les radiateurs ait eu le temps d'arriver, d'où un retard qui
se rajoute à l'inertie thermique du bâtiment.
La
fonction de
transfert d'un retard est analytiquement simple :
D'apparence
innocente, cette fonction de transfert pose quelques problèmes
techniques : vue comme celle d'un système linéaire
classique, elle est d'ordre infini. Elle possède donc une
infinité de pôles, et est donc susceptible de conduire,
en boucle fermée, à un système instable.
3.5.a Retard
pur : analyse temporelle
Nous
prendrons comme
exemple un circuit électronique imaginaire, dont les
entrées
et les sorties sont des tensions, construit conformément au
schéma bloc ci-dessous :
Si
nous appliquons un échelon de tension d'amplitude 1 V
à
l'entrée de ce schéma nous obtenons en sortie :
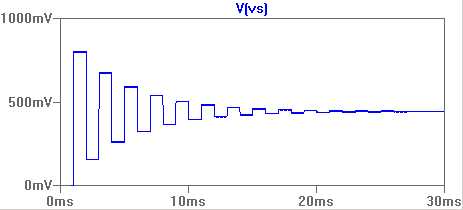
Cette
courbe oscillatoire amortie s'obtient sans peine en
« tournant
dans la boucle » au rythme du retard.
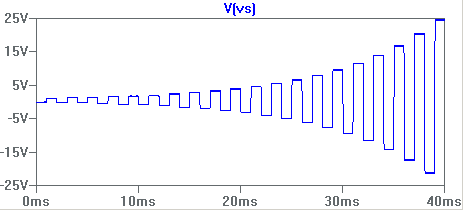
Si
le gain statique du circuit est augmenté, pour prendre la
valeur 1,1 (par exemple), la réponse à l'échelon
montre une instabilité franche (attention au changement de
l'échelle verticale) :
Les
systèmes
avec retard ont deux propriétés étranges :
Nous
reviendrons sur
l'étude de ces systèmes au moyen des outils
généraux
présentés dans le prochain chapitre. Contentons nous
d'indiquer l'allure du lieu des pôles de leur fonction de
transfert en boucle fermée.
3.5.b Retard
pur : lieu des pôles
Le
lieu des pôles
d'un système avec retard consiste à rechercher les
zéros (complexes) de l'équation

Trivialement
cette équation n'a pas de racine réelle. Si on pose
p = x + j y,
quelques calculs simples conduisent aux racines :
Il
y a donc une infinité de pôles, ce dont nous aurions pu
nous douter au vu des réponses temporelles.
Ces
pôles ont
tous la même partie réelle, négative si T0 < 1,
positive si T0 > 1,
nulle si T0 = 1.
Dans ce dernier cas, les pôles sont tous situés sur
l'axe imaginaire, régulièrement espacés de
2*p/t.
