Avant d'aborder la théorie sur les systèmes bouclés, il faut rappeler pourquoi on ne peut pas asservir une grandeur par une commande directe (voir paragraphe 1.3) et rappeler aussi la structure générale d'une boucle d'asservissement (voir paragraphe 1.4). Nous redonnons le schéma de principe d'une boucle d'asservissement et en dessous le schéma fonctionnel avec les notations symboliques des grandeurs et des fonctions de transfert.
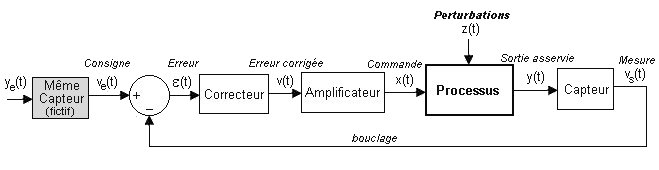

Soit T(p) la fonction de transfert en boucle ouverte Vs(p) / e(p). Cette fonction de transfert est tout simplement le produit des fonctions de transfert des quatre éléments (le correcteur, l'amplificateur, le processus et le capteur).
Fonction de transfert en boucle ouverte: T(p) = R(p).G(p).F(p).l
Nous verrons au cours des paragraphes de ce chapitre qu'il ne faudra pas, en général, calculer la fonction de transfert en boucle fermée pour déterminer les qualités de l'asservissement. Néanmoins dans des cas simples il est préférable d'étudier la fonction de transfert du système bouclé
W(p) = Vs / Ve = Y / Ye.
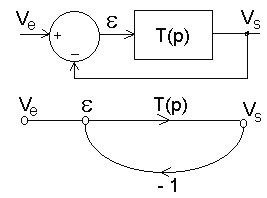 L'asservissement peut donc s'étudier comme étant un seul système, de fonction de transfert T(p), qui est bouclé. On peut en faire la représentation ci-contre:
L'asservissement peut donc s'étudier comme étant un seul système, de fonction de transfert T(p), qui est bouclé. On peut en faire la représentation ci-contre:
La règle de Mason permet d'écrire immédiatement la fonction de transfert en boucle fermée:
W(p) = T(p) / [1+T(p)]
Mais T(p) est un rapport : T(p) = n(p) / d(p) , ainsi il est plus facile d'exprimer W(p) en fonction de n et d :
W(p) = n(p) / [n(p) + d(p)]
Pour exprimer la fonction de transfert en boucle fermée il suffit d'ajouter le numérateur au dénominateur de la fonction de transfert en boucle ouverte.
En général nous connaissons T(p) sous une forme canonique factorisée puisque c'est un produit de fonctions de transfert (il suffit par exemple que le processus soit identifié par un modèle de Strejc).
Par contre n(p) + d(p) devient dans tous les cas un polynôme dont chaque coefficient dépend du réglage de gain du correcteur.
L'étude de cette fonction de transfert W(p) est donc souvent très compliquée. C'est pourquoi la théorie des asservissements est basée sur l'étude de la fonction de transfert T(p) en boucle ouverte afin d'en déduire les performances de l'asservissement (en boucle fermée).
Ainsi nous étudierons successivement la stabilité, l'amortissement, la précision et la vélocité des asservissements par l'examen de la fonction de transfert T(p) en boucle ouverte.
Bien sûr, dans les cas simples (premier ou second ordre) il est alors plus efficace de travailler sur la fonction de transfert W(p) en boucle fermée. Mais dès que l'ordre de T(p) est égal ou supérieur à 3 on ne calcule pas W(p).
