Pour réaliser un asservissement il ne faut pas seulement que la boucle soit stable, il faut en plus qu'elle soit bien amortie, de façon qu'à chaque changement de consigne et à chaque perturbation la réponse se fasse sans oscillations.
Nous avons vu dans le paragraphe 6.2 le critère du revers qui donne une notion graphique, à partir de la représentation du lieu de Nyquist en boucle ouverte, de l'amortissement en boucle fermée. Pour augmenter l'amortissement il faut augmenter la distance du lieu par rapport au point critique.
Cette distance sera chiffrée par deux grandeurs: la marge de phase Mj et la marge de gain MG.
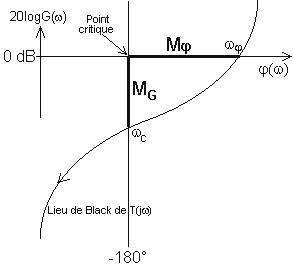
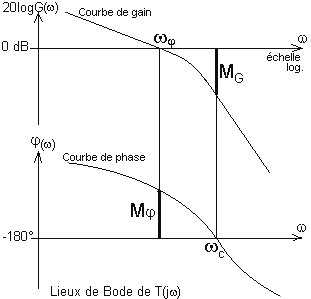
Avant de donner les méthodes de calcul de ces marges de stabilité, nous allons les définir graphiquement dans les trois représentations de T(jw):
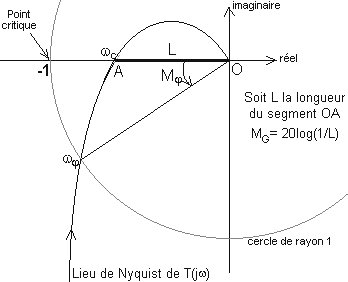 |  |
Sur le lieu de Nyquist, la marge de gain est d'autant plus grande que la longueur L du segment OA est petite, elle est inversement proportionnelle à cette longueur. On l'exprime en dB. |
 La marge de gain est positive si la courbe de gain est en-dessous de l'axe 0 dB pour la pulsation critique wc qui correspond à l'intersection de la courbe de phase avec l'axe -180°.
La marge de gain est positive si la courbe de gain est en-dessous de l'axe 0 dB pour la pulsation critique wc qui correspond à l'intersection de la courbe de phase avec l'axe -180°.
La marge de phase est positive si la courbe de phase est au-dessus de l'axe -180° pour la pulsation wj correspondant à l'intersection de la courbe de gain avec l'axe 0 dB.
En fait nous verrons plus loin que c'est la valeur de la marge de phase qui est la mieux corrélée à l'amortissement de la boucle.
6.3.1 Calcul de la marge de phase
A partir de l'expression imposée de la fonction de transfert T(p) en boucle ouverte, on remplace p par jw pour obtenir la transmittance harmonique T(jw) et on exprime le module çT(jw)ç et l'argument ^T(jw).
Ensuite il faut résoudre l'équation çT(jw)ç = 1 . La solution unique de cette équation est la pulsation wj.
Enfin on exprime la valeur de la marge de phase: Mj = 180° + ^T(jwj).
Remarque: Bien sûr ^T(jwj) est négatif (par exemple -150° qui correspondrait à une marge de phase de 30°).
6.3.2 Calcul de la marge de gain
Il faut déterminer la valeur de la pulsation critique wc en résolvant l'équation ^T(jw) = -180°.
La marge de gain (en dB) est : MG = 20.log[1/ çT(jwc)ç] .
6.3.3 Valeurs optimales des marges de stabilité
C'est la marge de phase qui est bien corrélée à l'amortissement de la boucle. La marge de gain doit simplement être dans tous les cas supérieure à 6 dB.
La valeur optimale de la marge de phase dépend de la classe de la fonction de transfert T(p) en boucle ouverte.
En classe 0 : Mj @ 65° En classe 1 ou 2 : Mj @ 50° Dans tous les cas il faut : MG > 6 dB.
Pour ces réglages de marge de stabilité la réponse indicielle de l'asservissement présentera un dépassement de l'ordre de 20% et la réponse harmonique une résonance d'environ 2,5 dB. Si, pour certaines applications, on estime que ces valeurs (20% de dépassement et 2,5 dB de résonance) sont encore trop grandes, il faut alors majorer la marge de phase de 5° (voire 10°). Mais il faut bien garder à l'esprit que ce sera au détriment de la vélocité et de la précision.
6.3.4 Réglage du gain de boucle
La fonction de transfert en boucle ouverte est proportionnelle à un gain K : T(p) = K.Tk(p).
T(jw) = K.Tk(jw) çT(jw)ç = K.çTk(jw)ç et ^T(jw) = ^Tk(jw).
On s'impose une marge de phase (par exemple 50° en classe 1) pour assurer un bon amortissement de la boucle.
On résoud l'équation : ^T(jw) = -180° + Mj
La solution de cette équation est nommée wG.
Il suffit maintenant d'imposer un module égal à 1 pour cette pulsation et on en déduit la valeur optimale K0 du gain K:
K0.çTk(jwG)ç = 1 donc K0 = 1 / çTk(jwG)ç .
Il reste à vérifier que, pour ce réglage, la marge de gain est suffisante. Pour ce faire on peut calculer le réglage critique Kc qui rendrait la boucle juste instable:
On résoud l'équation ^T(jw) = -180° . La solution est la pulsation critique wc.
Pour la pulsation critique on règle le module à 1 : Kc.çTk(jwc)ç = 1 donc Kc = 1 / çTk(jwc)ç .
En reprenant le résultat du paragraphe 5.3.2, pour le réglage K0 la marge de gain est
MG = 20.log[1 / K0.çTk(jwc)ç ].
Mais nous venons de voir juste au-dessus qu'on peut remplacer 1 par Kc.çTk(jwc)ç
donc MG = 20.log[Kc / K0]
