Les
sondeurs multi-faisceaux sont des systèmes acoustiques permettant d'obtenir des relevés
topographiques du relief sous-marin (bathymétrie) et des images de réflectivité du
fond, qui caractérisent sa nature (imagerie).
La
mesure de la bathymétrie consiste à déterminer :
-
l’instant de retour d’un
écho après émission qui permet de déduire la distance oblique
-
l’angle d’incidence de
cet écho q
L’imagerie
est déduite, comme pour le sonar latéral, de l’amplitude de l’écho.
Classification des sondeurs
acoustiques

Ces
sondeurs utilisent la technique des faisceaux croisés. Les navires disposant de ce type
de sondeur multi-faisceaux sont équipés d’une
antenne plane (émetteur perpendiculaire au récepteur) ou d'une antenne circulaire.
Le
sondeur mesure simultanément la profondeur suivant plusieurs directions déterminées par
les faisceaux de réception du système.
Le
signal est reçu par un grand nombre de transducteurs élémentaires. Chaque signal est
numérisé et traité par un microprocesseur. L'algorithme de ce processeur a pour tâche
de générer les faisceaux réception à l'aide des signaux reçus (plusieurs signaux
élémentaires permettent la création d'un faisceau réception).
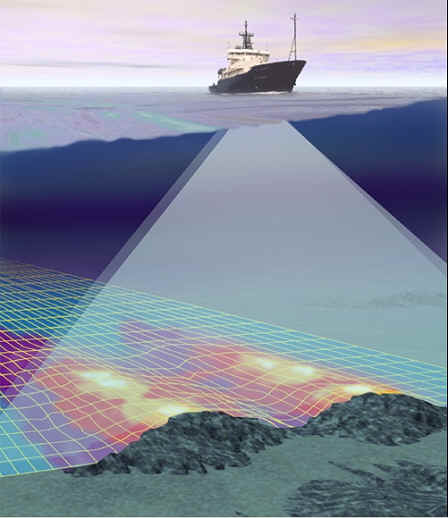
Les
faisceaux émis forment une fauchée perpendiculaire à l'axe de déplacement du navire.
La
largeur de la fauchée est égale à 5 à 7 fois la profondeur.
L'impulsion
sonore est émise en faisceaux étroits longitudinalement et larges transversalement
(150°). La réception se fait à l'aide de faisceaux étroits dans le plan transversal (1
à 5°). L'intersection, entre le faisceau émis et un faisceau réception, est nommée
"pastille insonifiée". Les cycles d'émissions et réceptions s'échelonnent au
fur et à mesure que le navire avance. La juxtaposition des différentes fauchées
constitue une image acoustique des fonds marins (Fig. VI.16)
Le
signal reçu par l'antenne réception est amplifié de façon à garder l'amplitude du
signal constante en fonction de la profondeur et de l'incidence.
Si la durée de l'impulsion est t = 1ms la
résolution en distance s'exprime par :
Dd
= c. t/2 = 0,75m
Les
échos sont séparés au mieux du temps t, correspondant
à une distance radiale de 75cm. On applique dès lors une compensation en gain fonction
de l'instant de retour de l'écho.
Une
méthode utilisée pour connaître l'instant de retour est de fixer to
au centre de gravité de l'amplitude du signal reçu.
Pour
connaître l'angle d'incidence q, il suffit de
connaître le retard d'arrivée Dt sur deux
sous-antennes de réception proches l'une de l'autre.
La
position de la fauchée sur le fond marin peut être corrigée en fonction du tangage et
du lacet provoqué par la houle. Cette correction se fait en modifiant l’angle q d’inclinaison
des faisceaux émis par formation de voies.
Fig. VI.16 Faisceaux croisés
Le
nombre de faisceaux réception varie selon les sondeurs entre une dizaine et plusieurs
centaines. L'angle entre l'axe de deux faisceaux réception consécutifs peut être
constant ou tel que la distance séparant deux "pieds" de faisceaux, soit
constante.
La fréquence d'émission est
comprise entre 10kHz et 400kHz
La durée de l'impulsion t est de l'ordre
de 1 à 20ms soit une résolution en distance.
0.75m < Dd = c. t/2 < 15m
L'énergie
émise pendant la durée t détermine
également la profondeur maximale d'exploration.
La PRF varie entre 10Hz et
quelques 0,1Hz en fonction de la profondeur.
To = 1/Fo = 2.Dmax / c
Dmax
est la distance maximale oblique
c = 1500m/s
To = 2.P/ (c.cosqM)
qM la demi-ouverture maximale du faisceau d'émission
Pour une demi-ouverture de 75° et
une profondeur de 1000m
la période de répétition des
impulsions est:
To = 5s
Les
sondeurs multi-faisceaux sont interfacés avec un système GPS permettant d'avoir les
coordonnées précises des relevés topographiques.
Ces
sondeurs disposent également de centrales d'attitude inertielles permettant de connaître
la position du bateau dans les trois axes, afin de corriger au mieux la position de la
fauchée par rapport à la verticale du lieu.
La
vitesse VN du bateau sondeur est telle que l'échantillonnage
longitudinal soit inférieur à la résolution longitudinale.
Pour une profondeur P =1000m et
une ouverture longitudinale qL =
1,8°
la largeur minimale de la fauchée
est:
dm
= 2.P.tg(qL/2) = 31m (Fig.
VI.3)
VN < dm/To = 31/5 » 6m/s = 12kt (Nœuds)*
Les
surfaces sondées sont considérables et peuvent atteindre 8000m2 sur
une largeur de 20km par jour d’exploration (voir annexe 9).
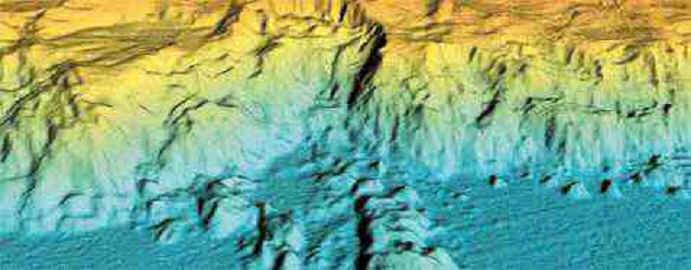
Image
cartographique des fonds marins
* 1kt = 1,852km/h
