|
La réponse indicielle d'un asservissement bien amorti est caractérisée par son temps de montée tm et par un faible dépassement (par exemple 15%). |
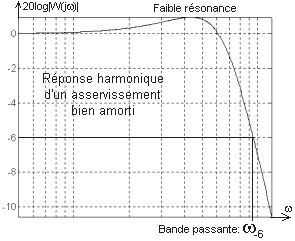
La réponse harmonique d'un asservissement bien amorti est caractérisée par sa bande passante à - 6 dB (w-6) et par une faible résonance (par exemple 1,4 dB). |
 |
 |
La vélocité de l'asservissement pourra être chiffrée soit par la valeur de son temps de montée, soit par la valeur de sa bande passante, sachant que le produit tm.w-6 est constant : si on double la bande passante, le temps de montée est divisé par 2.
Les réponses ci-dessus sont comparables à celles d'un système du second ordre bien amorti (par exemple z = 0,5). Pour un système du second ordre on a : tm.w-6 = p.31/2 @ 5,44 .
Nous admettrons que pour un asservissement quelconque nous aurons sensiblement le même résultat.
Expérimentalement il est facile de mesurer le temps de montée; c'est plus délicat de mesurer la bande passante (surtout si elle est très faible comme dans le cas d'un asservissement de température).
Par la théorie c'est le contraire: il est très difficile de calculer le temps de montée, alors qu'il est facile de calculer la bande passante.
Nous nous servirons par conséquent de la relation empirique tm.w-6 @ 5,44 pour chiffrer la donnée manquante.
Mais nous avons dit au début du chapitre 6 que nous allons étudier l'ensemble des qualités d'un asservissement en utilisant uniquement l'expression de sa fonction de transfert T(p) en boucle ouverte.
Nous allons comparer ci-dessous la courbe de gain de T(jw) en boucle ouverte et celle de W(jw) en boucle fermée.
 Au paragraphe 6.1 nous avons vu :
Au paragraphe 6.1 nous avons vu :
T(p) = n(p) / d(p) et W(p) = n(p) / [n(p) + d(p)] donc:
T(jw) = n(jw) / d(jw) et W(jw) = n(jw) / [n(jw) + d(jw)]
Bien sûr le degré de n(p) est inférieur au degré de d(p) : tous les asservissements sont des filtres passe-bas.
Donc plus la pulsation w augmente, plus n(jw) devient petit par rapport à d(jw), d'où: Pour w grand W(jw) --> T(jw)
Ainsi pour w grand par rapport à la bande passante les deux courbes de gain (en boucle ouverte et en boucle fermée) se rejoignent (ainsi que les courbes de phase évidemment).
Inversement pour w petit, le gain en boucle ouverte est très grand (notamment s'il y a un intégrateur), et de ce fait le gain en boucle fermée est égal à 1 [cette fois c'est d(jw) qui est négligeable par rapport à n(jw)].
Au passage à - 6 dB les deux courbes ne sont pas encore confondues, mais on peut estimer que pour un bon amortissement de la boucle il y a toujours environ un rapport 1,25 entre les deux pulsations w-6BO et w-6 (cette dernière pulsation correspondant à la bande passante de l'asservissement).
Le passage des courbes de gain à - 6 dB correspond à un module égal à 0,5 [20log0,5 = -6].
L'étude théorique de la vélocité d'un asservissement consiste donc à résoudre l'équation:
çT(jw)ç = 0,5 . La solution de cette équation est w-6BO.
On en déduit la bande passante de l'asservissement : w-6 @ 1,25.w-6BO ainsi que son temps de montée tm @ 5,44 / w-6 .
De plus, si l'asservissement est bien amorti, la réponse indicielle, (voir la réponse au début du paragraphe), sera pratiquement en régime permanent au bout de 2,5 pseudo-périodes : tR = 2,5tm.
Remarque: Cette méthode ne permet pas de calculer précisément le temps de montée de l'asservissement puisqu'on fait deux approximations empiriques: d'abord le coefficient 1,25 puis le coefficient 5,44. Aussi il faut arrondir les résultats obtenus.
