- Approche avec
une correspondance continu-numérique
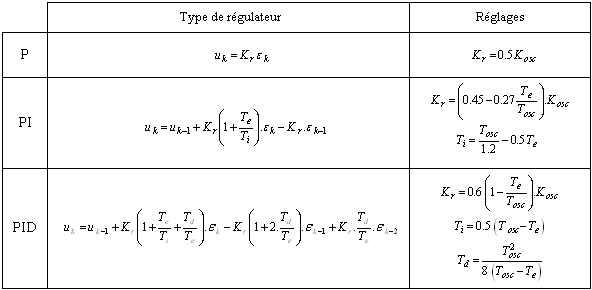
Exemple : Régulateur
PID par la méthode de Takahashi
A partir de
l’identification du procédé en boucle fermée en régime auto-oscillant, relever
le gain limite de stabilité  et la période de
l’oscillation limite
et la période de
l’oscillation limite  . Puis utiliser le tableau
ci-dessous proposé par Takahashi où la détermination des coefficients résulte
d’un critère d’optimisation qui minimise la somme de la valeur absolue de l’écart
. Puis utiliser le tableau
ci-dessous proposé par Takahashi où la détermination des coefficients résulte
d’un critère d’optimisation qui minimise la somme de la valeur absolue de l’écart
 .
.
- Approche
harmonique avec la transformée en w
Nous pouvons placer un réseau
correcteur du type avance ou retard de phase comme dans le domaine continu,
après avoir exprimé le transfert du procédé vu par la partie numérique  et avoir choisi un gain
et avoir choisi un gain  de l’algorithme numérique (critère de
précision par exemple). Nous exprimons
de l’algorithme numérique (critère de
précision par exemple). Nous exprimons  avec
avec  et traçons dans le plan de Bode
et traçons dans le plan de Bode  . Nous pouvons ainsi placer des
correcteurs en w (forme avance et/ou retard de phase) comme en continu.
L’expression du transfert en z équivalent consiste à remplacer dans la
forme en w l’opérateur w par
. Nous pouvons ainsi placer des
correcteurs en w (forme avance et/ou retard de phase) comme en continu.
L’expression du transfert en z équivalent consiste à remplacer dans la
forme en w l’opérateur w par  . Un
point à vérifier systématiquement est que quand la pulsation fictive v
tend vers l’infini, la pulsation réelle tendant vers une valeur finie
. Un
point à vérifier systématiquement est que quand la pulsation fictive v
tend vers l’infini, la pulsation réelle tendant vers une valeur finie  le diagramme en amplitude se termine
toujours par une asymptote horizontale.
le diagramme en amplitude se termine
toujours par une asymptote horizontale.
- Approches
spécifiques au numérique
Nous pouvons envisager d’utiliser l’approche
numérique pour soit définir des régulateurs non réalisables avec une
technologie analogique, ou soit ,en remarquant que la commande du procédé
s’effectue en boucle ouverte, injecter la commande adéquate pour obliger le
système à réagir de manière optimale.
Nous avons vu dans le
module AU3 qu’un système identifié par un modèle de Broïda, est difficile à
gérer par un régulateur PID si le facteur de réglabilité rapport entre le
retard pur et la constante de temps du procédé devient grand  .
.
Une structure particulière de
régulateur PI associé à un compensateur de temps mort (CTM) souvent appelé PIR
permet d’améliorer ce type de boucle. Le « secret » est simple en
numérique un fonctionnement retard pur de  secondes
revient à libérer les échantillons n coups plus tard avec
secondes
revient à libérer les échantillons n coups plus tard avec  .
.
- Technique de
compensation
Nous pouvons imaginer de
définir une structure de régulateur avec un nombre de coefficients satisfaisants
afin d’avoir un dénominateur de fonction de transfert de boucle fermée
échantillonnée résultant qui corresponde à un type de comportement particulier
par exemple un deuxième ordre avec un amortissement et un temps de réponse
imposé. La synthèse se trouve essentiellement numérique et temporelle.
Un cas particulier de
cette approche est de viser un dénominateur de boucle fermée identique à
l’unité, cela veut dire que la sortie est atteinte en un nombre de coups fini.
Nous pouvons alors parler de systèmes à temps de réponse fini, dans ce cas nous
avons su injecter l’échantillon ou la succession d’échantillons de commande
qu’il faut pour atteindre l’objectif voulu.
Pour forcer en commande
numérique une table à se positionner en un temps minimum, nous pouvons imaginer
définir une commande en trois temps : premier temps accélération du moteur
jusqu’à sa vitesse maximale, deuxième temps déplacement à vitesse maximale et
troisième temps décélération pour arriver pile à la distance voulue. Pour
réaliser ce genre d’optimisation, il faut tenir compte des charges entraînées
et donc des limites physiques du système. De plus, il faut développer des
cellules de commande auto-configurables à plusieurs plages de fonctionnement
qui nécessitent échantillonnage et programmation.
Quelques éléments de bibliographie :
-
Cours et exercices corrigés
Collection Sciences et Technologies (IUT BTS Licence) Editeur Technip
Automatique des
systèmes échantillonnés P. Borne et al
2000
-
Cours, exercices et problèmes
corrigés Collection Technosup (1er
cycle : bases) Edition Ellipses
Systèmes
asservis linéaires M. Villain
1996
Signaux
et systèmes continus et échantillonnés M. Villain
1996