L’essentiel de notre présentation est basé sur une structure
de correction série. Cette approche est de loin la plus répandue. La fonction
de transfert correcteur représente la relation erreur-commande.
Boucle
correction série
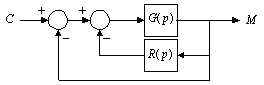
Nous pouvons imaginer une correction parallèle ou mixte (exemple
boucle amplification en série et retour tachymétrique) .
Boucle correction
parallèle
Boucle correction
mixte
Nous présentons une dernière forme de boucle avec un élément
de correction hors bouclage, nous disposons alors de trois degrés de liberté
avec la possibilité pour le correcteur hors bouclage d’éviter les sauts de
variation brutale de consigne en entrée de boucle.
Boucle correction à
trois degrés de liberté
Dans la suite de la fiche, nous ne développons que la
correction série.