Un des régulateurs industriels les plus utilisés est le
PID : action proportionnelle, action intégrale et action dérivée. Nous
retrouvons grâce aux actions proportionnelle et intégrale la possibilité d’agir
sur la précision et d’apporter de la phase par l’action dérivée pour avoir une
stabilité satisfaisante.
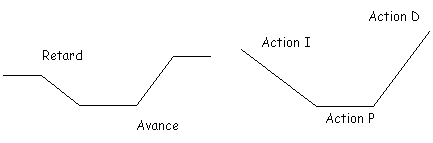
Les combinaisons possibles sont de type P, PI, PD et PID. La
figure ci-dessous représente sous forme des asymptotes, une comparaison en
module entre le correcteur retard-avance et le régulateur PID.
Asymptotes
en module retard-avance et PID
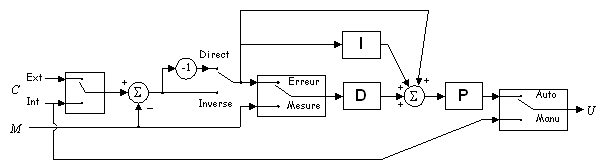
- Architecture d’un régulateur PID
Exemple d’un PID à
structure mixte
- Fonction de transfert des 3 actions
Action proportionnelle :
Action intégrale :

Action dérivée non filtrée :

et filtrée
- Structures de base (action dérivée non filtrée)
Type mixte :
Type parallèle :
Type
série :
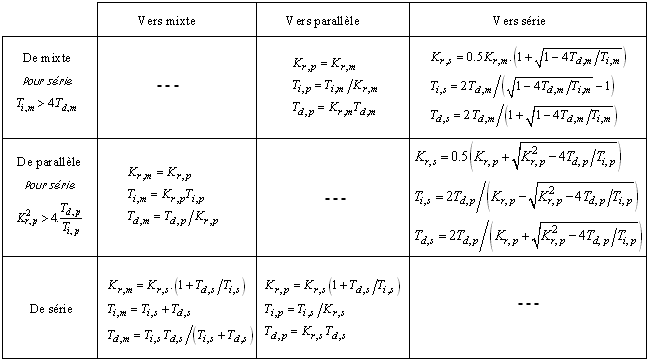
- Passage d’une structure à une autre
La connaissance du type de structure
est impérative. La synthèse du régulateur est réalisée à partir d’une
structure donnée, le régleur doit ensuite adapter les valeurs des actions à
régler à la structure technologique du régulateur.