|
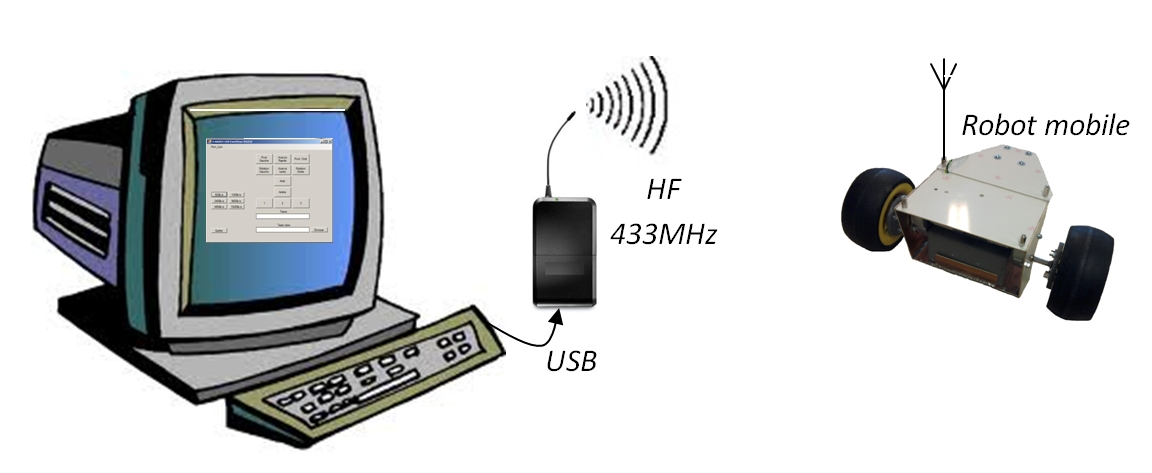
L'objectif de cette étude est
la commande par un PC d'un petit robot tripode rouleur.
La transmission entre la PC et le mobile se fait par une liaison
radio HF 433MHz.
Une interface Visual Studio dédiée permet la
dialogue homme/machine.
- Matériel nécessaire:
*** Plate-forme MPLab de Microchip
si l'on souhaite modifier les programmes fournis.
*** Outil de programmation Pickit-programmer si l'on souhaite
programmer un PIC avec les programmes fournis.
Télécharger sur IUTenLigne ou sur le site de Mircochip
*** Outil de CAO électronique si l'on souhaite modifier
les cartes électroniques.
Pickit2

- Prérequis
*** Connaissances en langage
C si l'on souhaite modifier les programmes. (liens IUTenLigne)
*** Connaissances en réalisation de circuits imprimés
en électronique. (liens IUTenLigne)
|