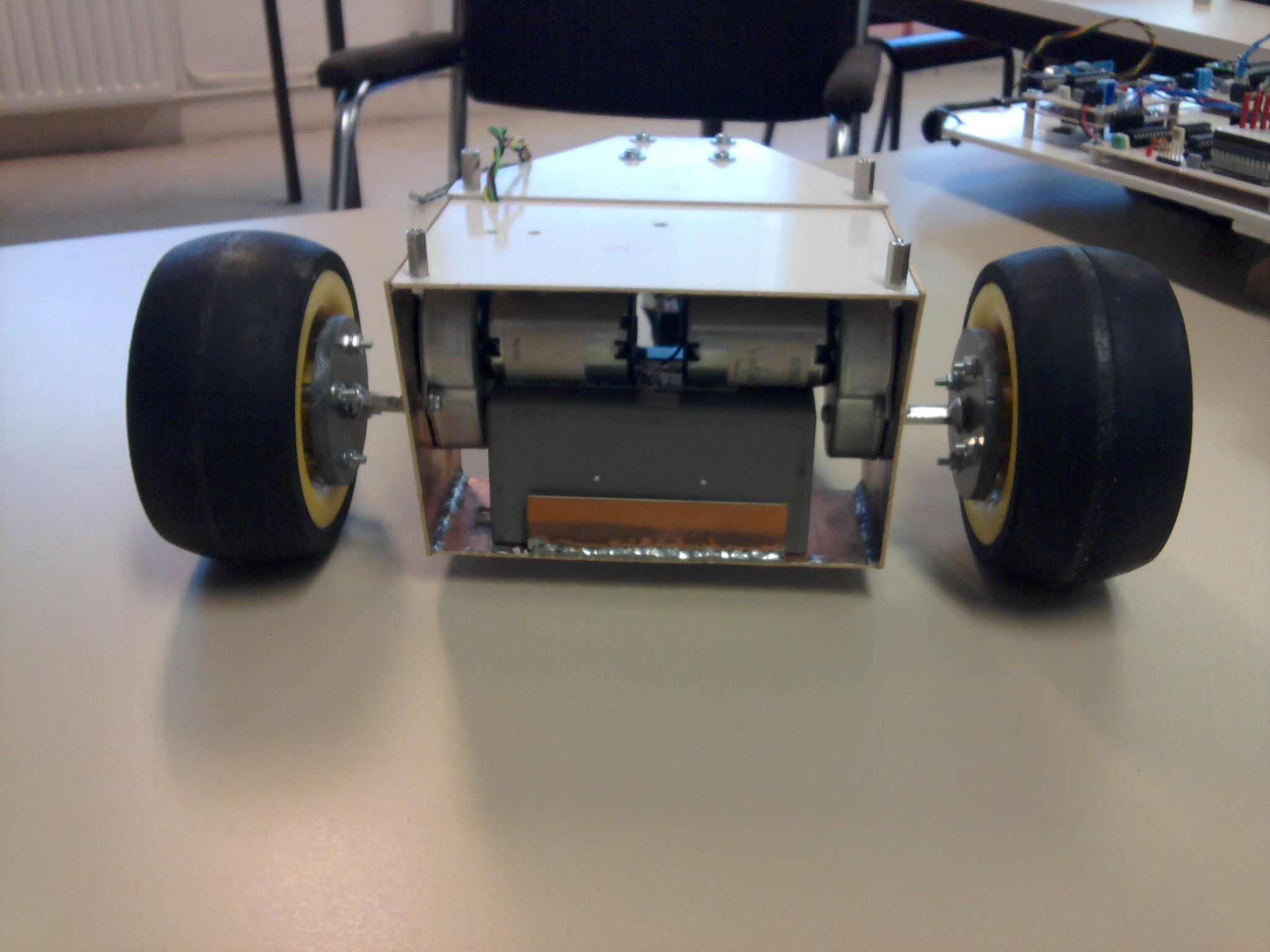
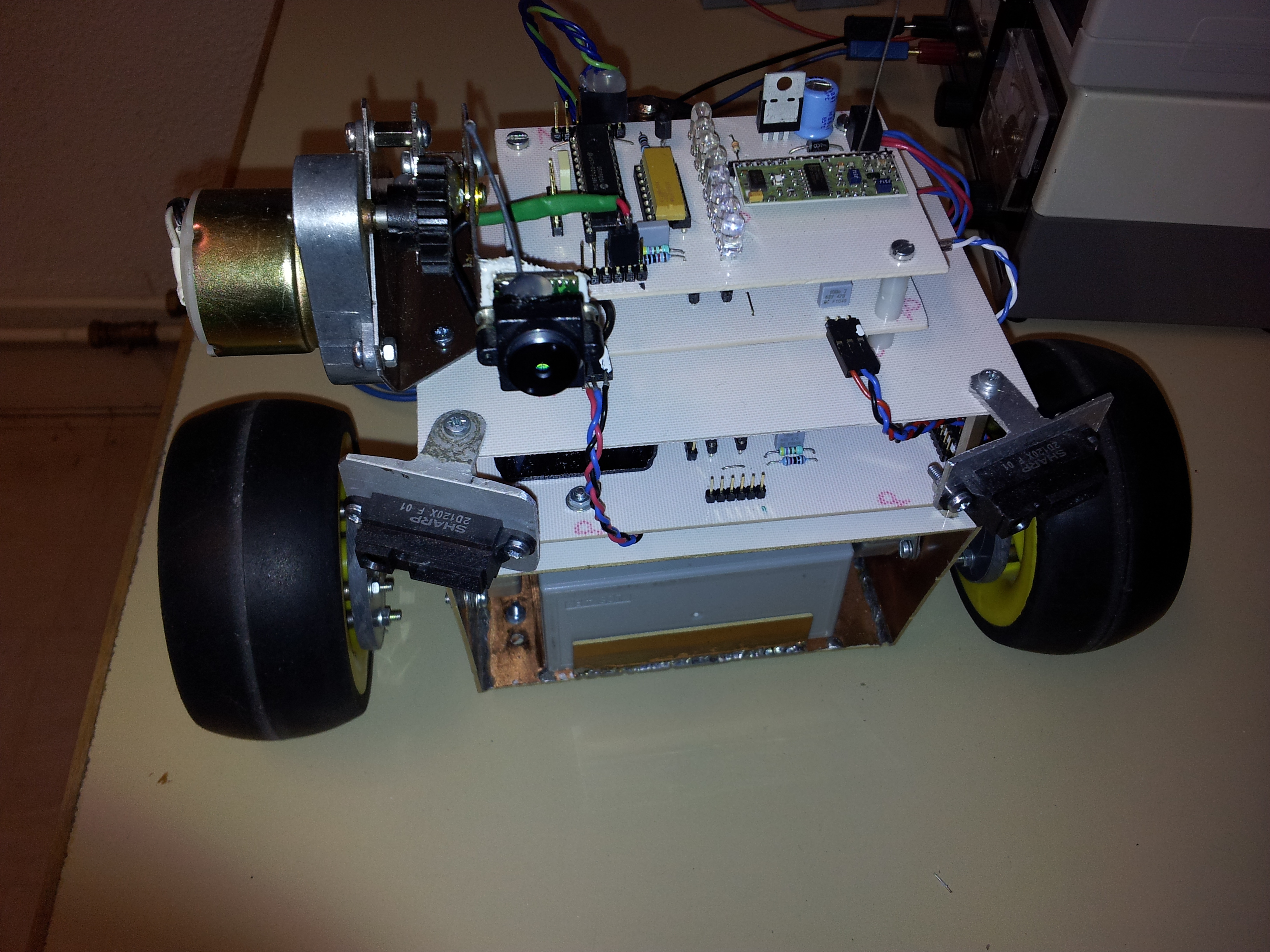
Notre robot est un tripode
constitué de deux roues tractrices et directrices et
d'une roulette folle arrière.
Deux moteurs à courant continu réductés
permettent de diriger ce robot.
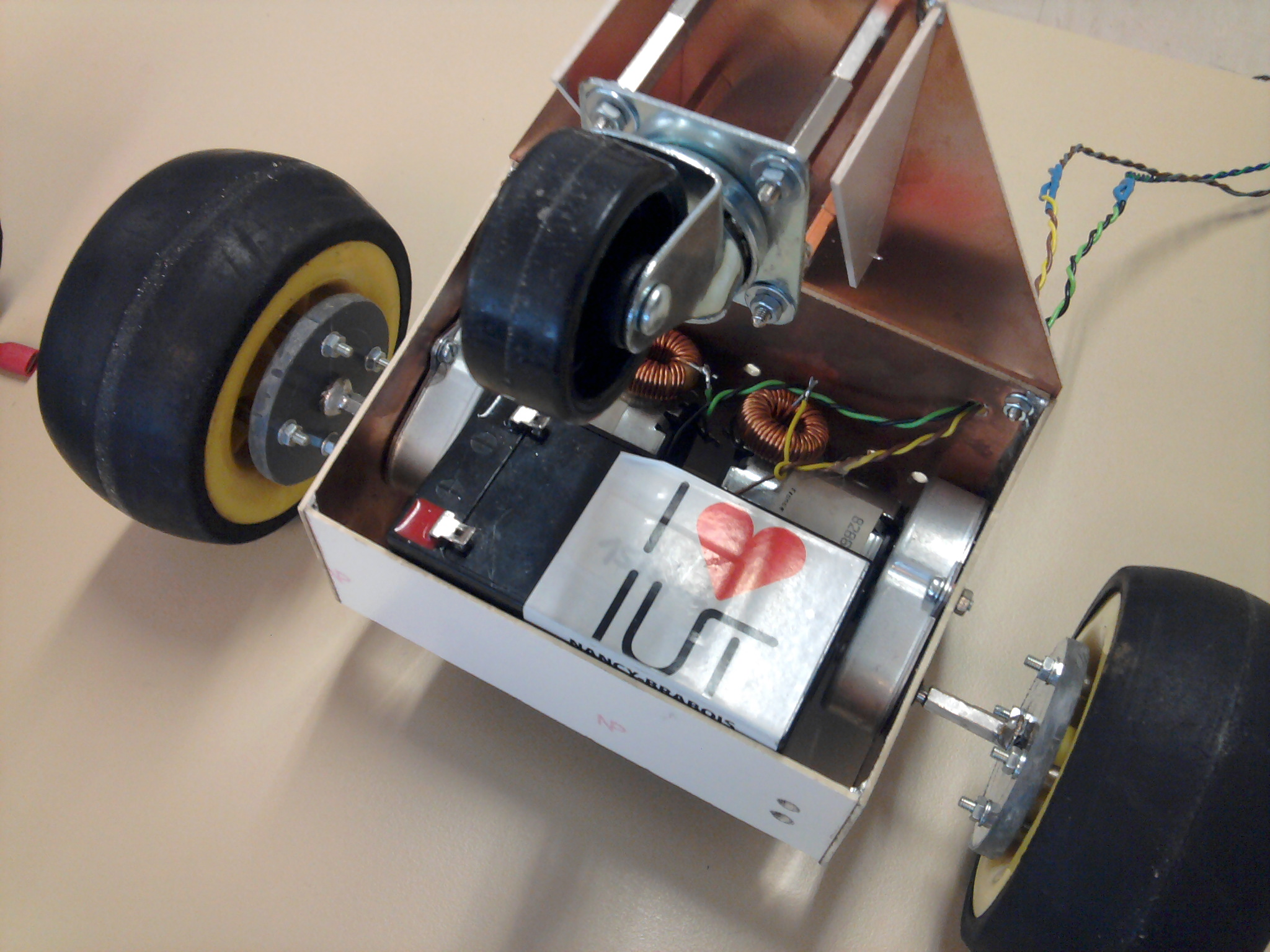
Un compartiment est prévu pour le logement de la batterie
12V/1.2Ah.
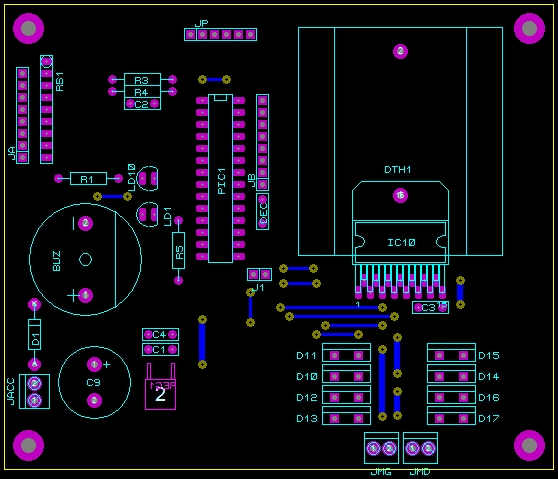
Le corps du robot est réalisé à l'aide
circuit imprimé simple face soudé.
|
Compartiment batterie
|
Roulette folle
arrière
|
|
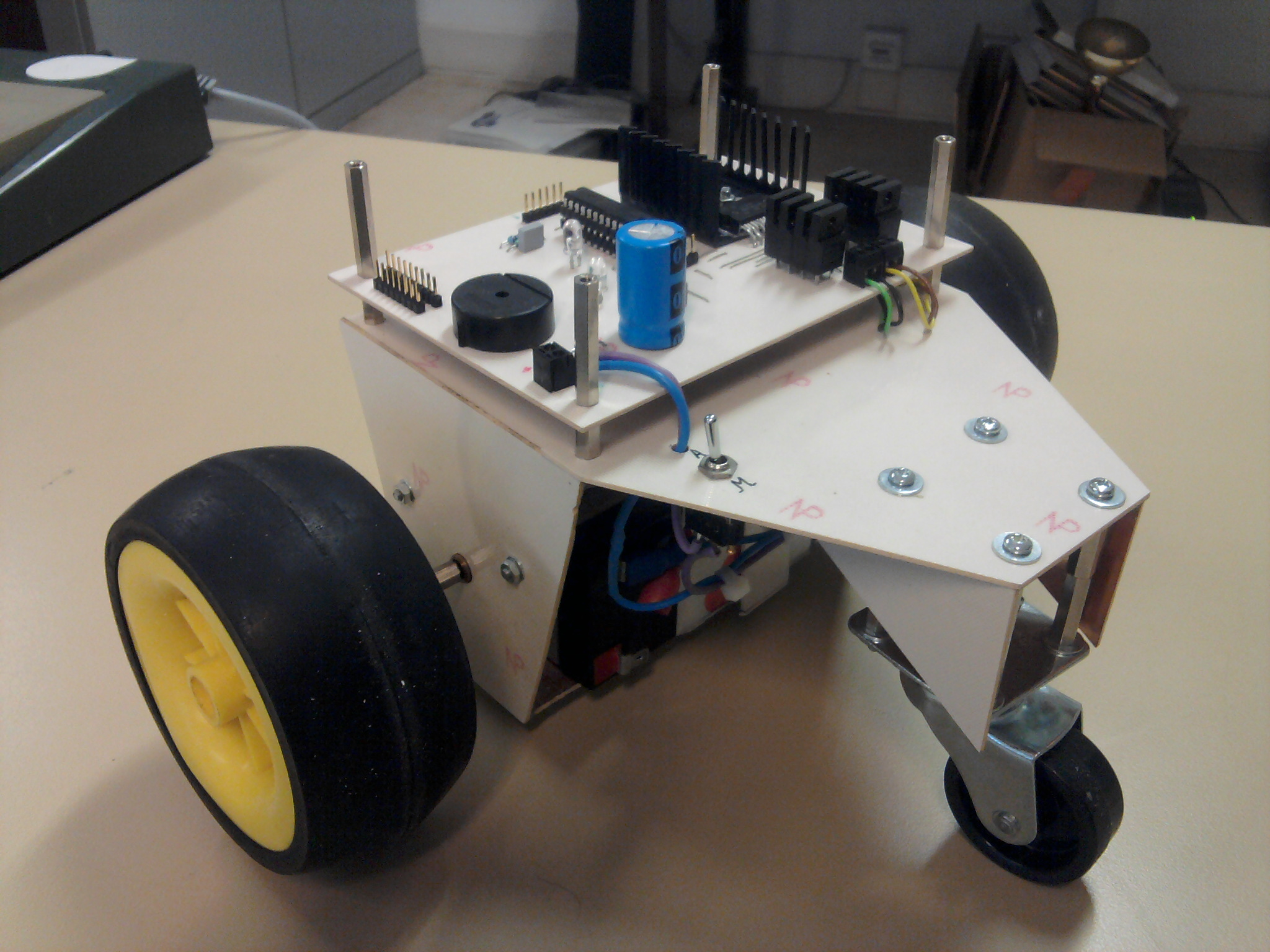
Les cartes électroniques sont
montées sur des entretoises filetées.
La carte réception au dessus de la carte puissance.
|
Carte Puissance
|
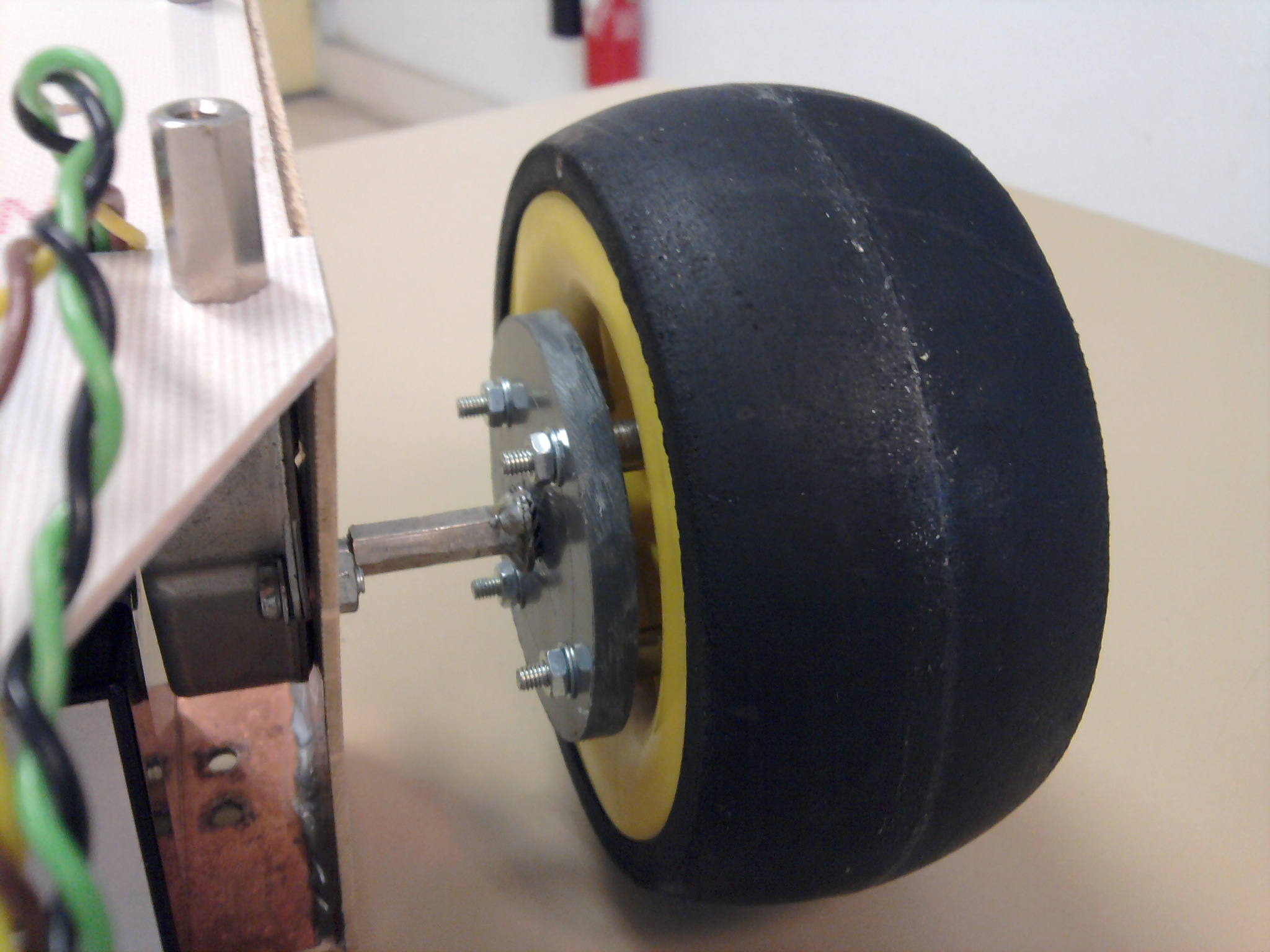
Flasque de fixation
des roues
|
|
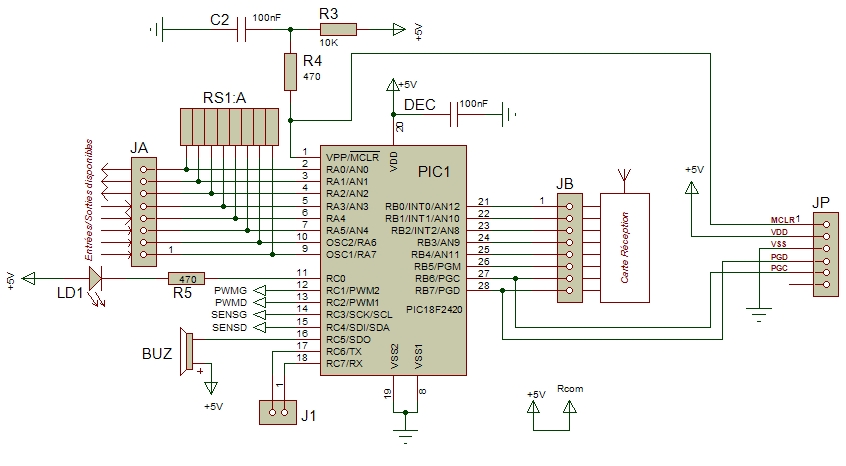
La carte réception est connectée
à un microcontrôleur PIC18F2420, qui va commander
les moteurs en fonction des ordres reçus.
Ce microcontrôleur prendra également en charge
les futurs capteurs qui équiperont notre mobile.
(Détecteurs de proximité US, capteur de choc,
commande d'un bras robot, orientation d'une caméra
etc...)
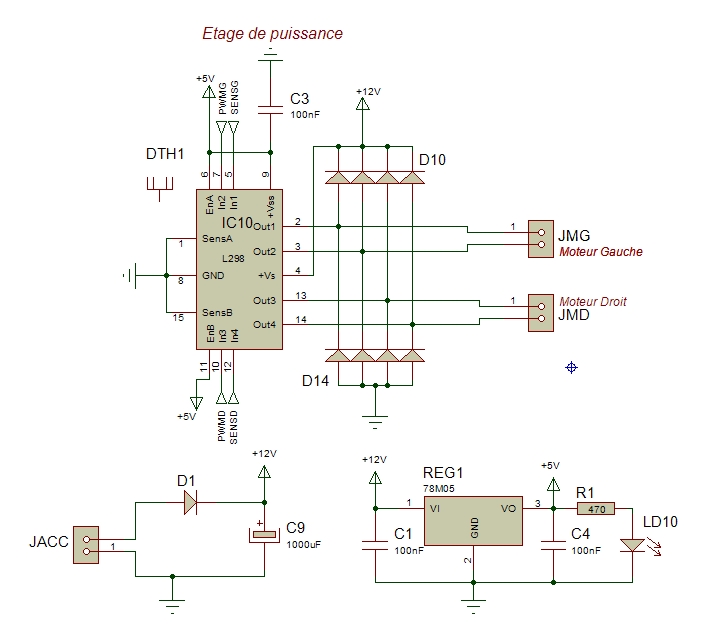
La commande des moteurs se fait via un circuit de puissance
L298 double pont en H.
Un buzzer est prévu, amenant une dimension sonore à
notre mobile.
 PIC18F2420.pdf
PIC18F2420.pdf
L298.pdf
|
Schémas de la carte puissance
|
|
|
|
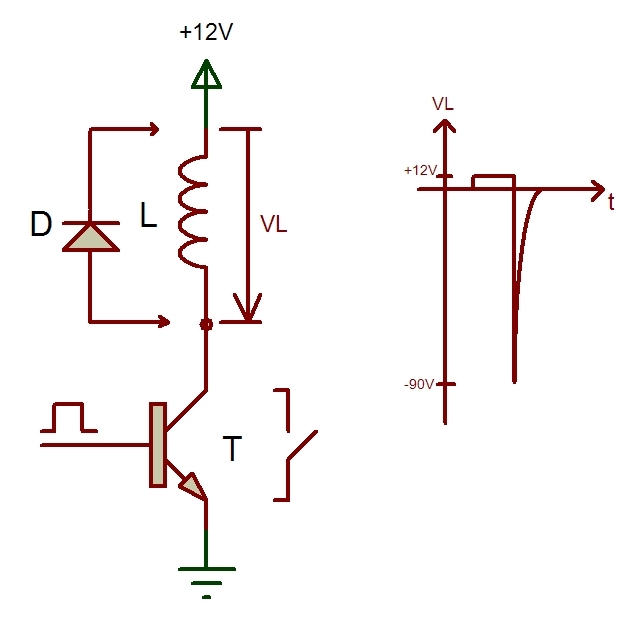
Les transistors de commande des moteurs (internes au L298),
fonctionnent en commutation.
La variation de vitesse des moteurs se fait en changeant le
rapport cyclique des signaux de commande.
Ces transistors sont assimilables à des interrupteurs.
Le moteur représente une charge selfique.
A l'ouverture de l'interrupteur, il se crée une tension
inverse importante, communément appelée "effet
de self".
Cette particularité est souvent mise à profit
lorsque l'on souhaite obtenir des tensions élevées.
Ce principe est utilisé par exemple pour créer
l'étincelle de la bougie d'une voiture.
Aux bornes d'un interrupteur cela entraîne souvent l'apparition
d'une étincelle, qui avec le temps, use les contacts
de cet interrupteur.
Il en est autrement lorsque l'interrupteur est un transistor.
En effet, un transistor classique ne peut supporter qu'une
tension Vce inverse de l'ordre de 40V.
D'où l'utilisation d'une diode "de
roue libre", qui court-circuite cette tension inverse
et la limite à -0.6V.
Cette diode de roue libre est donc indispensable chaque fois
que l'on commande une charge selfique comme un moteur, un
relais, un électro-aimant etc...
|
|
|
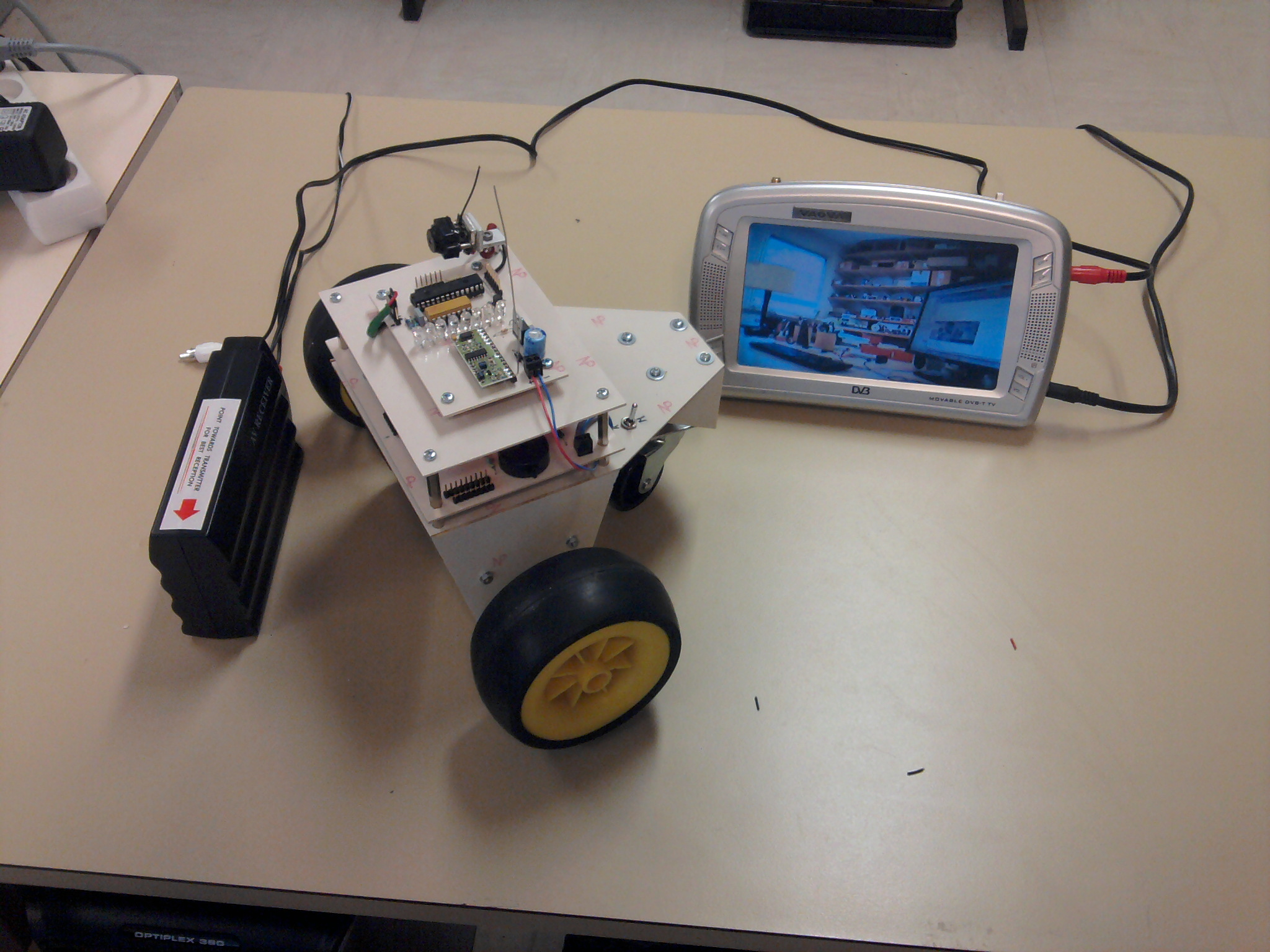
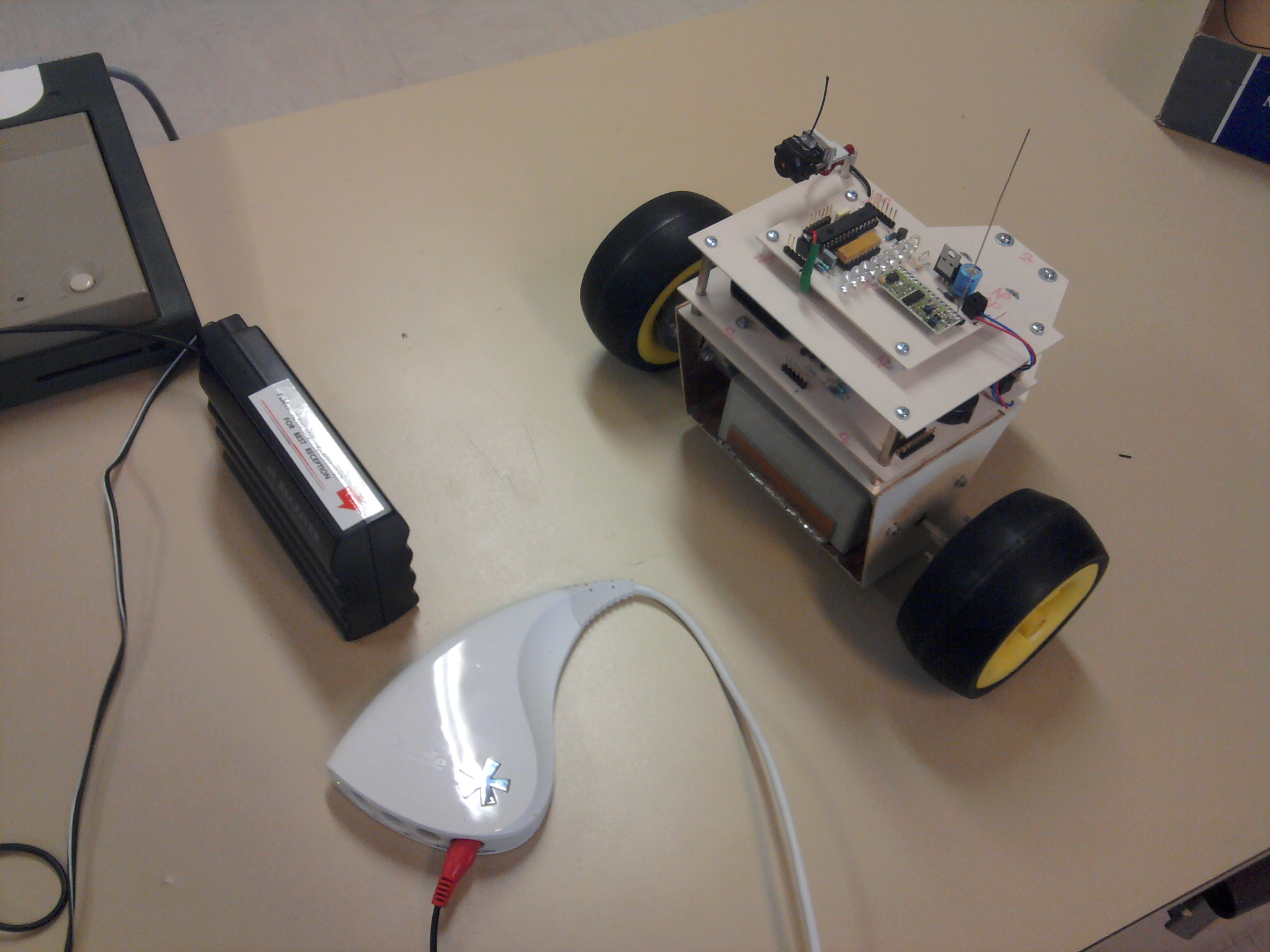
Équipé d'une caméra
HF 2.4GHz notre robot devient un outil de surveillance piloté
à distance.
|
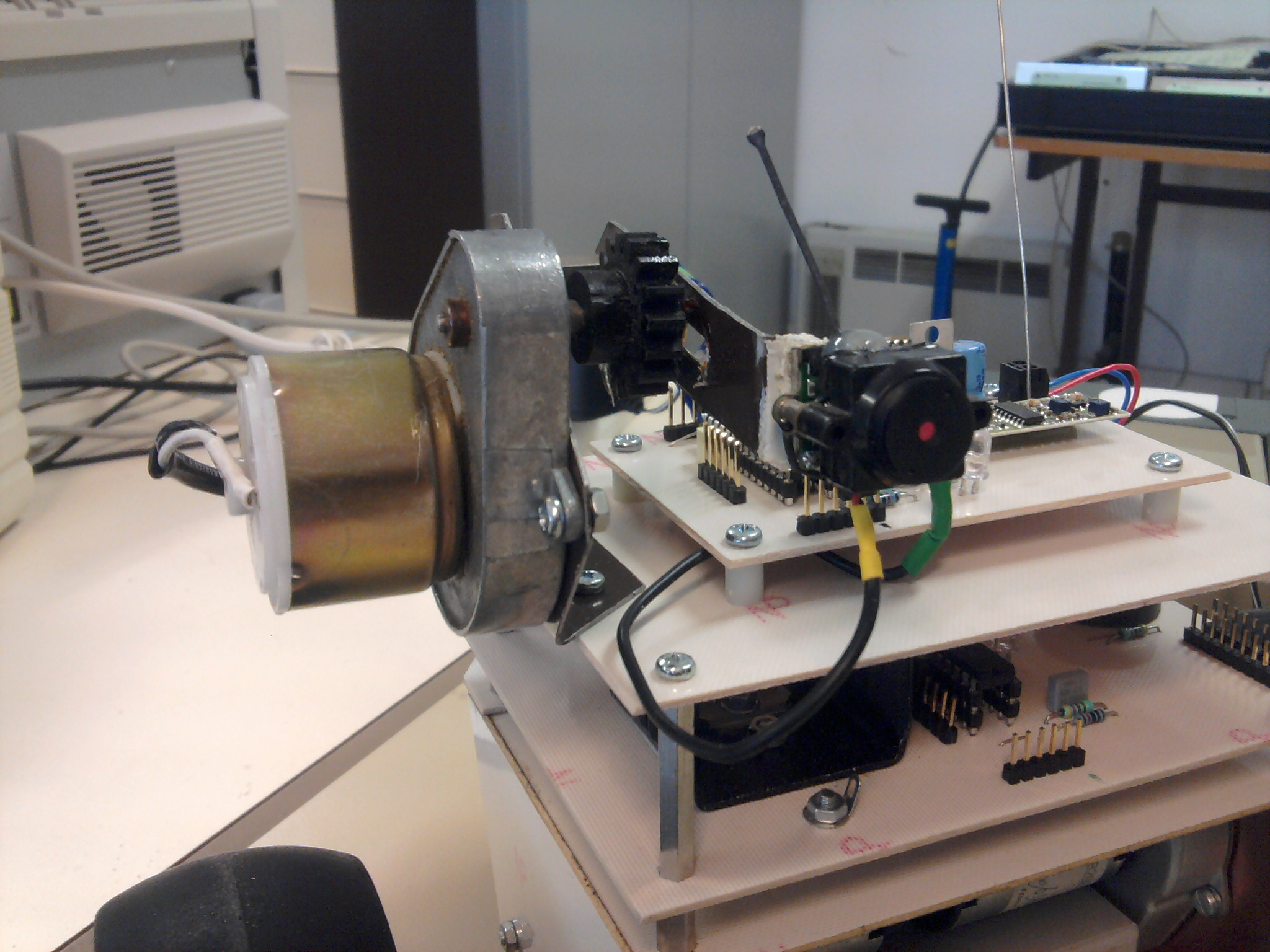
Carte réception montée
sur le robot
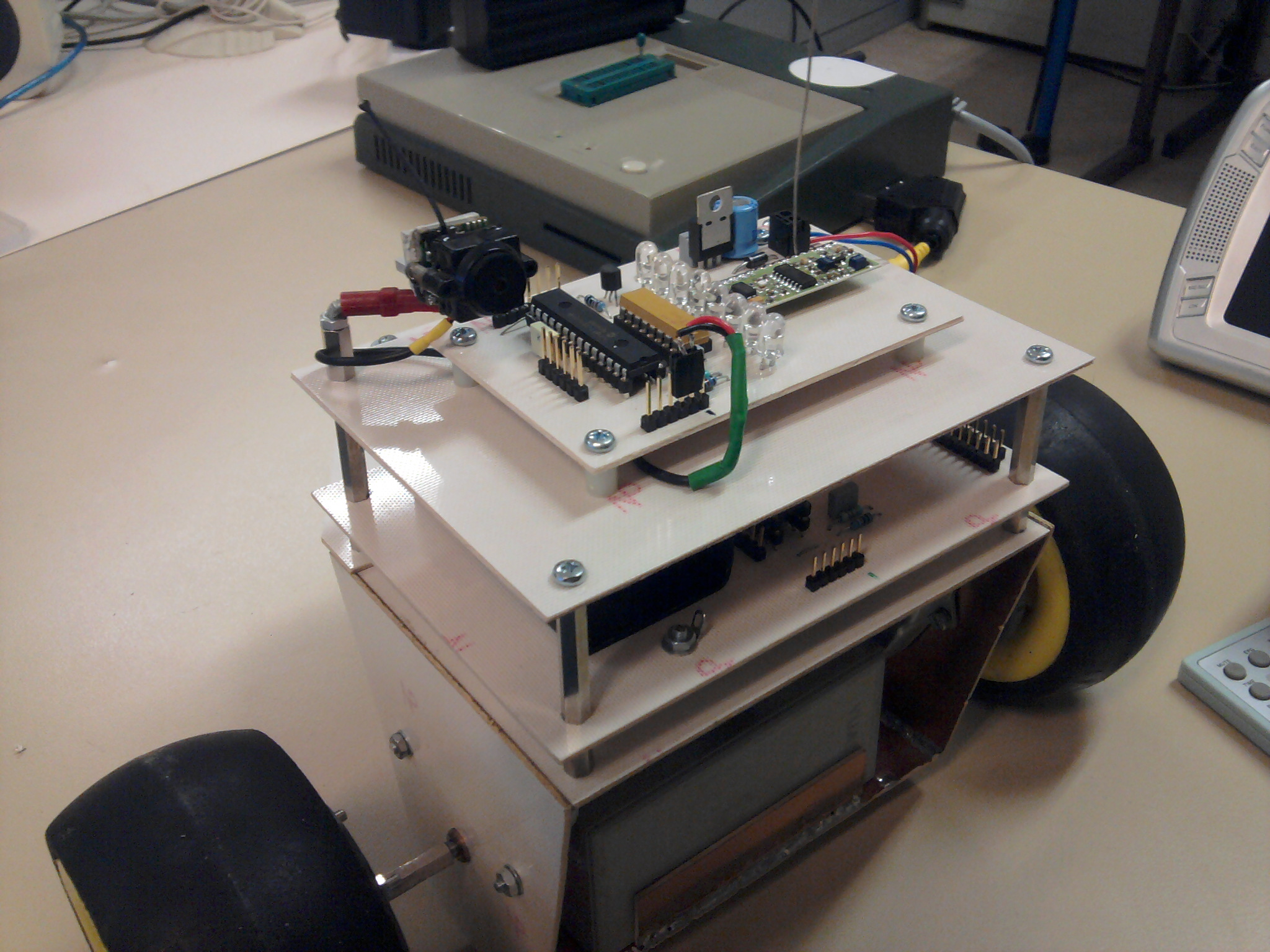
La carte réception est montée
au dessus de la carte puissance,
séparée de celle-ci par un plan cuivré
faisant office de blindage.
|
Caméra HF 2.4GHz
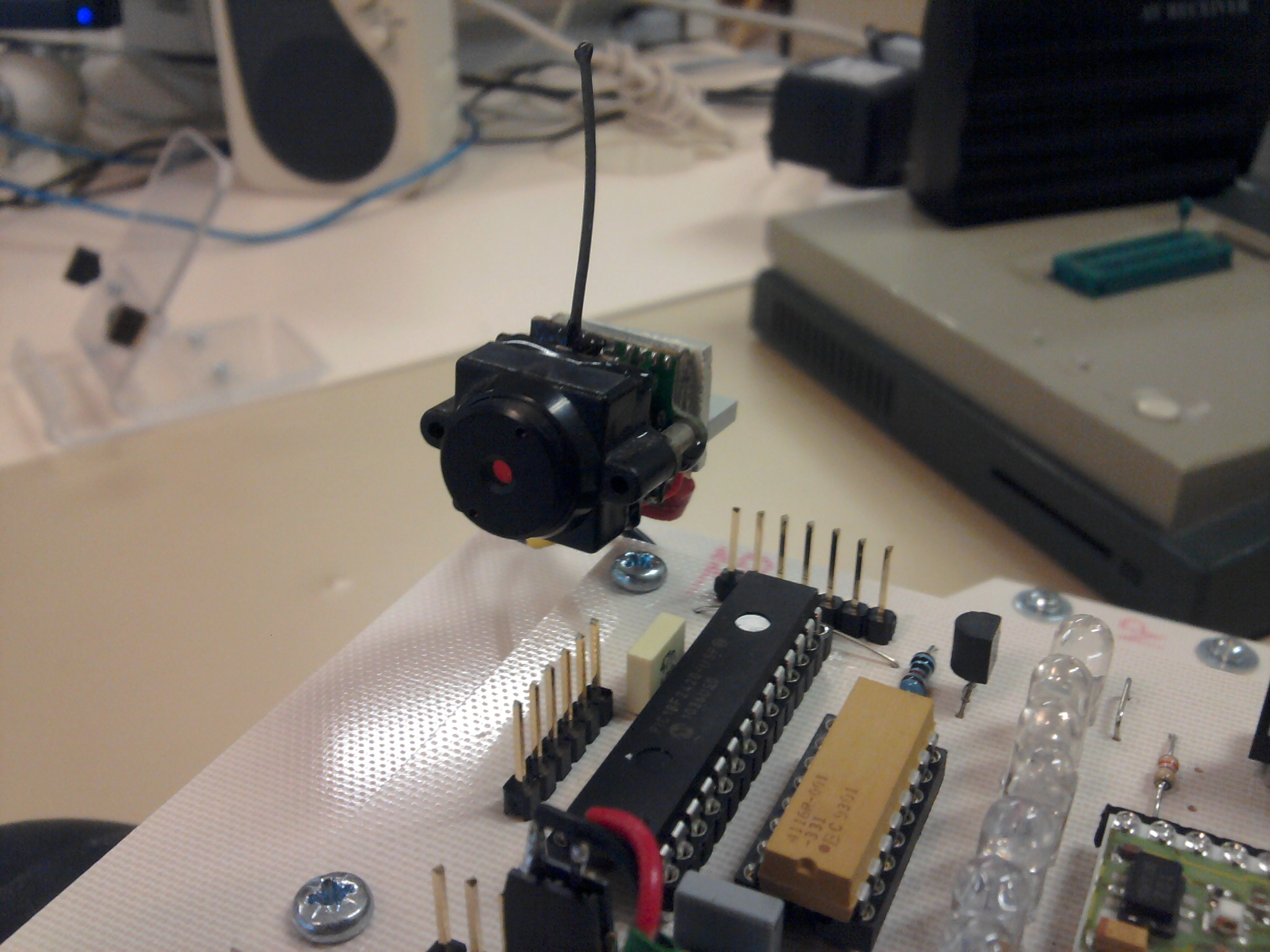
Une caméra miniature HF
permet de suivre le robot dans ses déplacements.
|
Ensemble Récepteur 2.4GH z
- Robot+cam - Moniteur
|
Ensemble Récepteur 2.4GHz
- Robot+cam - Carte Vidéo
|
|
Le retour caméra peut se faire
sur un simple moniteur TV ou par l'intermédiaire d'une
carte vidéo du commerce.
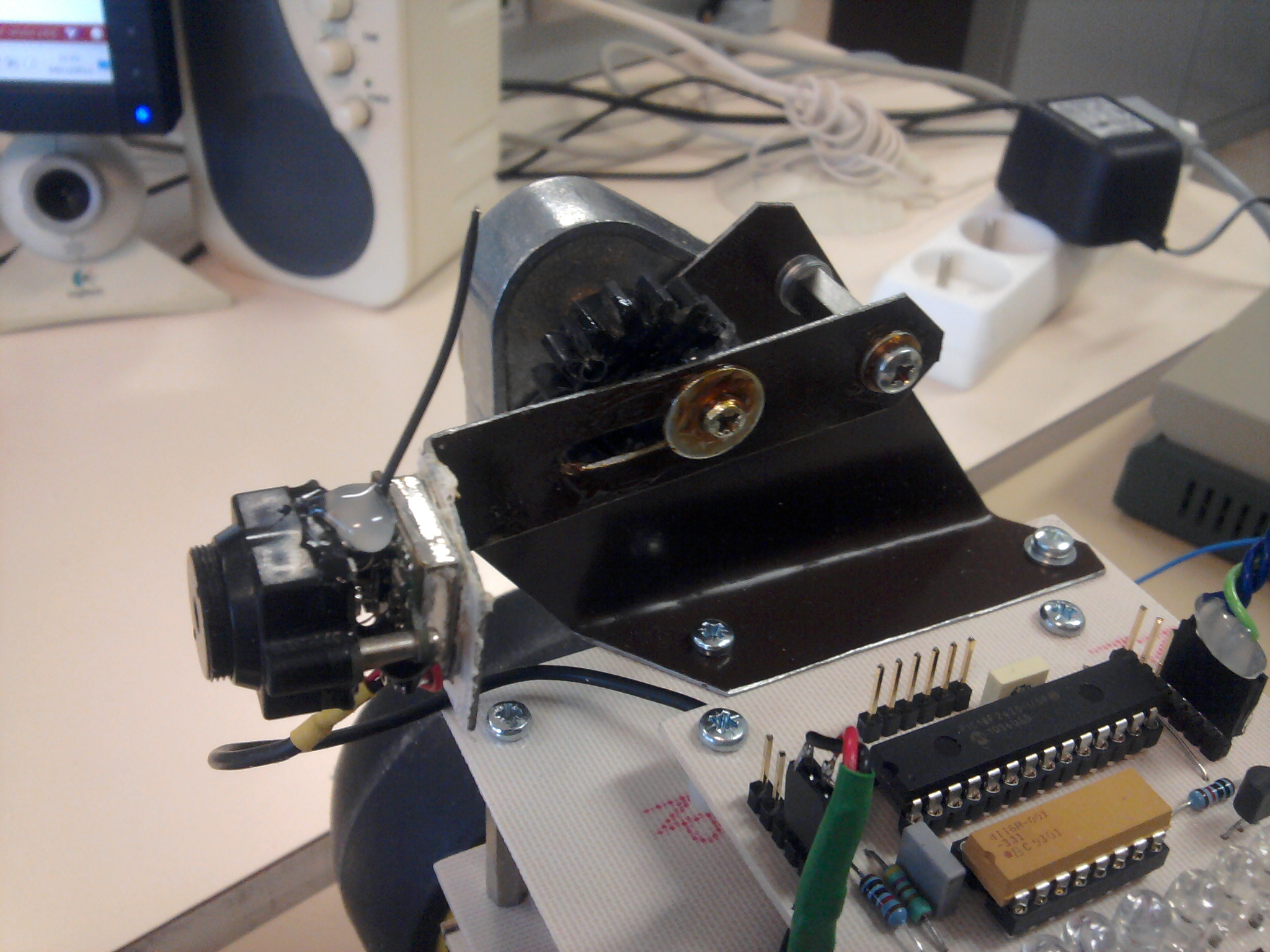
La caméra peut être orientée
verticalement.
Un dispositif, constitué d'un moteur et d'une came,
agit sur le bras support de caméra.
Cette façon de faire évite l'utilisation de
fin de course, mais limite le débattement verticale.
Le moteur est fortement réducté ce qui permet
une orientation lente de la caméra.
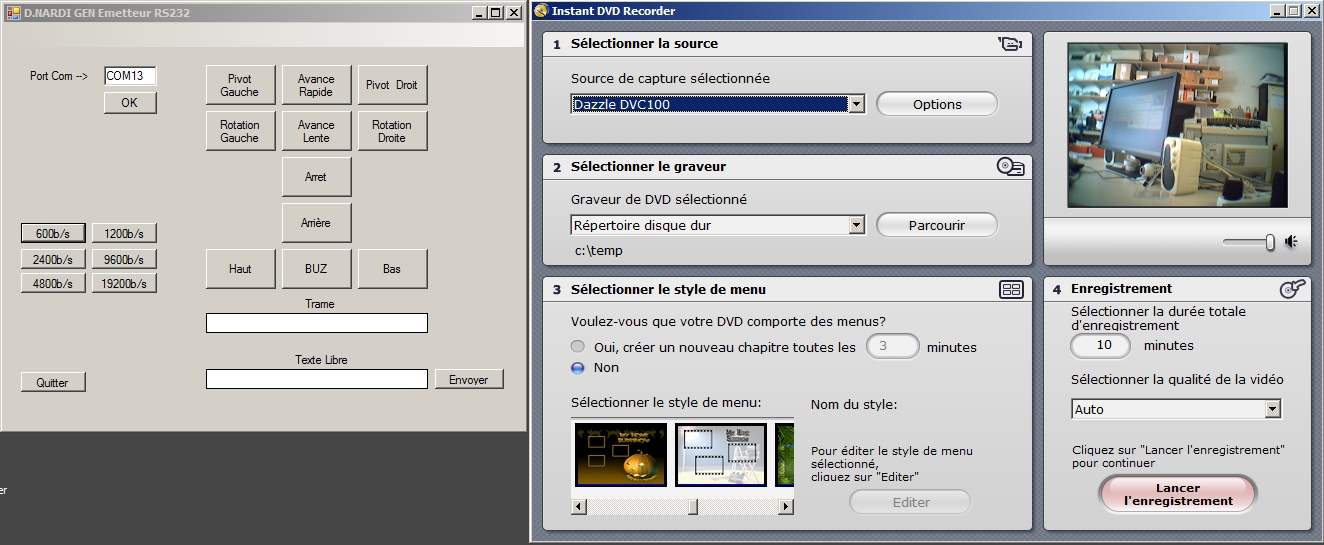
Le déplacement verticale de la caméra est commandé
par les boutons "Haut" et "Bas" de l'application
PC.
Une petite carte électronique est prévue pour
la commande de ce moteur par la carte puissance.
|
|
|
|
Des capteurs de proximité
infra-rouges ont été montés pour éviter
les collisions
qui pourraient endomager la caméra.
|
La carte Dazzle DVC100 Pinnacle, permet la réception
de la vidéo sur le PC, ainsi que son enregistrement
sur le disque dur.
On dispose dès lors, d'un système complet avec
commande HF du déplacement du robot et retour caméra.
 |
Il peut néanmoins être
intéressant de commander le déplacement du
robot sans passer par l'application PC.
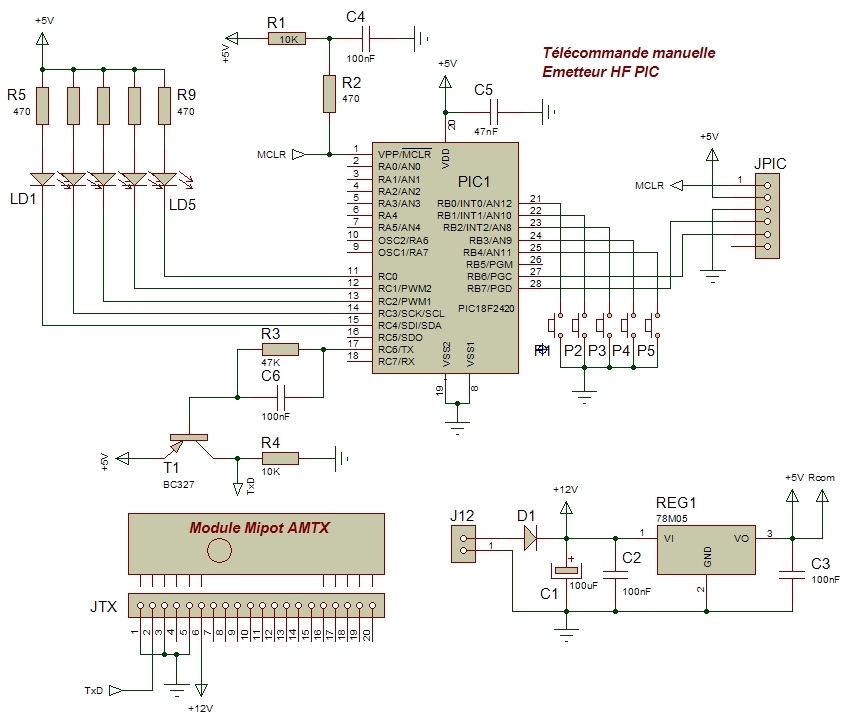
Une télécommande HF manuelle a été
développée dans ce but.
Les actions possibles avec cette télécommande
sont:
- Avant Rapide
- Arrière Lent
- Pivot Gauche
- Pivot Droit
- Buzzer
La commande "Arrêt" est envoyée au
relaché de chaque touche.
Télécommande manuelle

Schéma télécommande
manuelle
Typon télécommande
manuelle
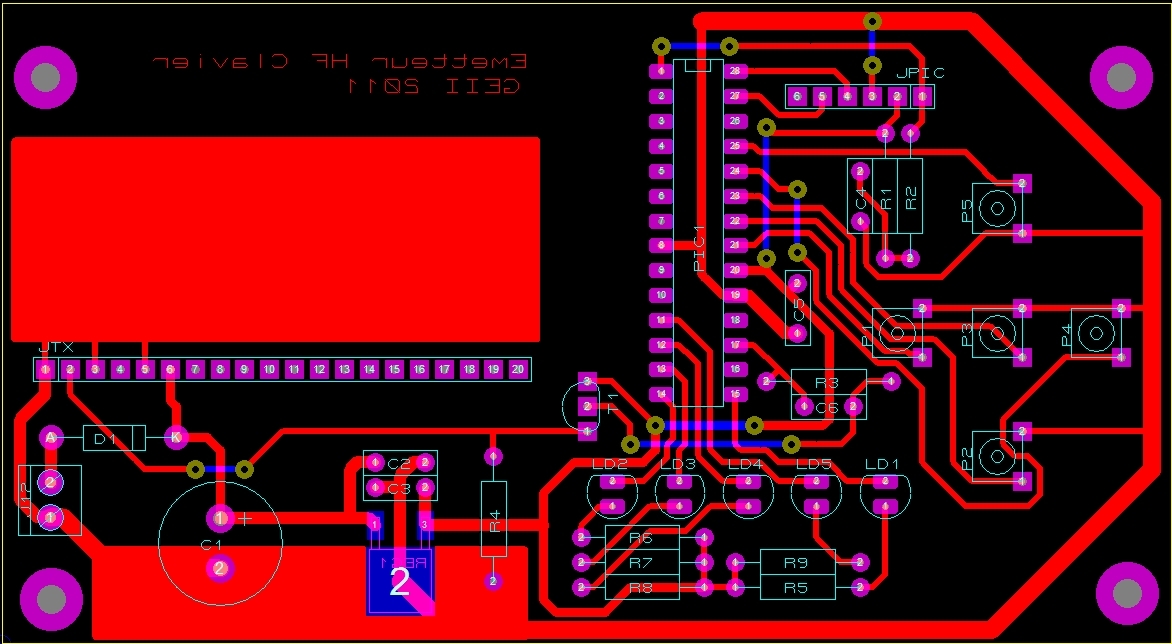
 Télécharger
le typon de la télécommande manuelle
Télécharger
le typon de la télécommande manuelle
 Télécharger
le programme C télécommande manuelle
Télécharger
le programme C télécommande manuelle
|