|
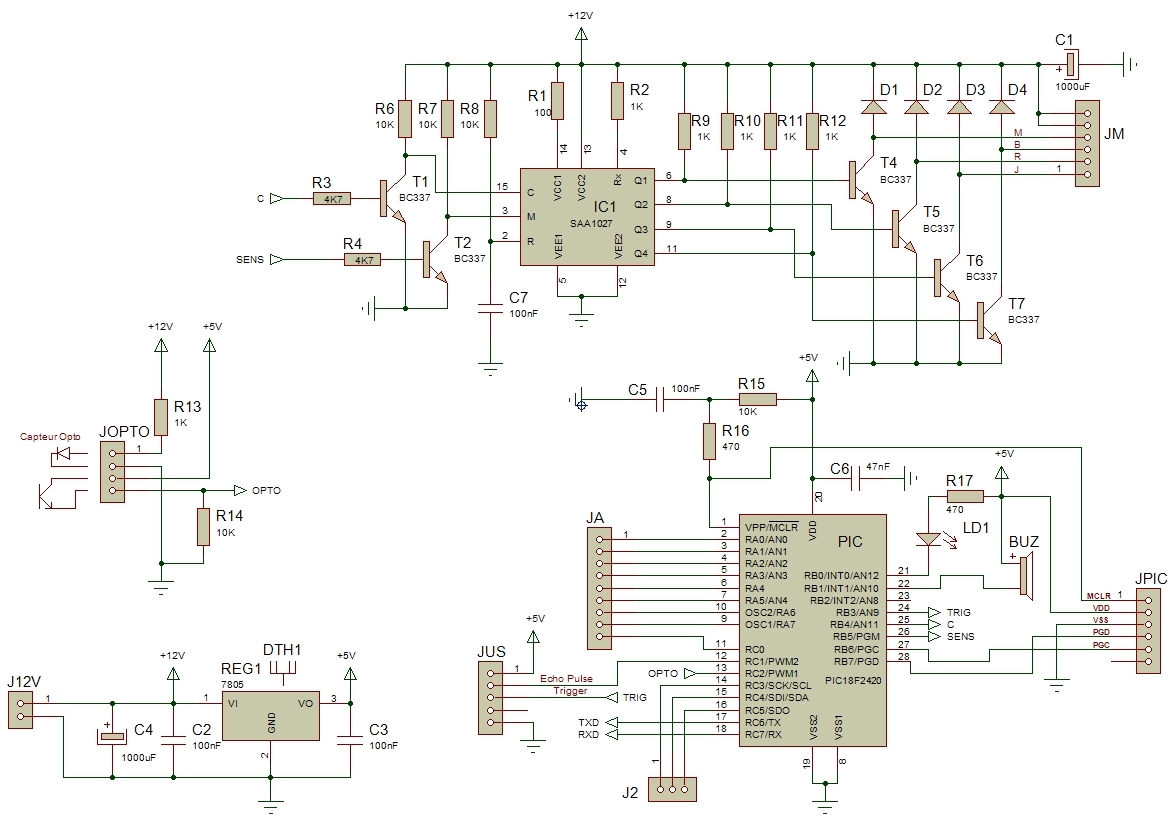
L'électronique est architecturée
autour d'un microcontrôleur PIC
18F2420. 
Ce microcontrôleur gère les différents
périphériques nécessaires au fonctionnement
du sonar.
- Il envoie vers le module sonar une demande de mesure sous
la forme d'une impulsion de 20us (Trigger) et mesure la largeur
de l'impulsion de retour (Écho-Pulse),
proportionnelle à la distance d'un éventuel
obstacle.
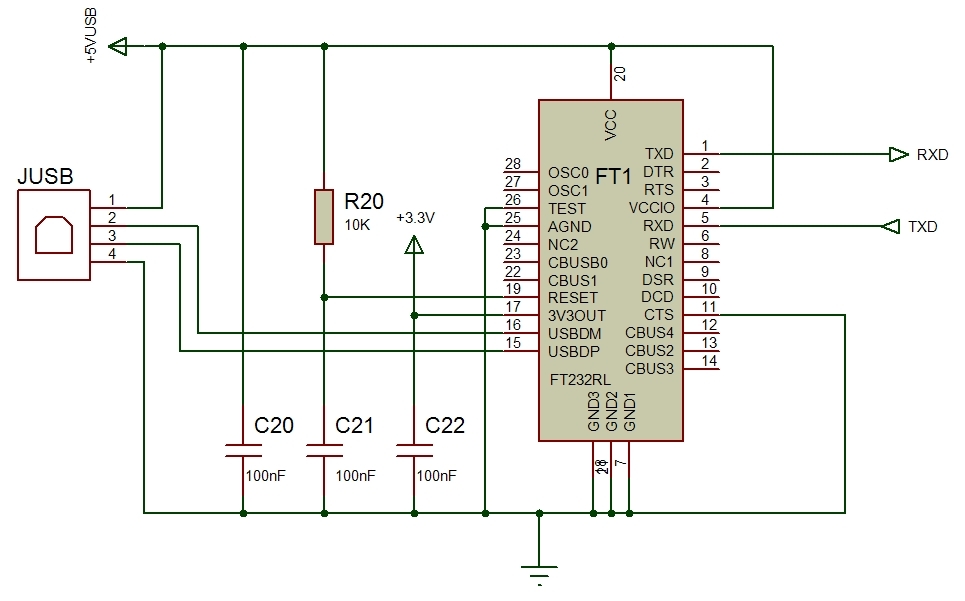
- Il transmet cette mesure par liaison
série à 38400b/s grâce à une interface
USB/Série réalisée par le circuit
FT232.
- Il commande
la rotation du moteur pas-à-pas (JM) par l'intermédiaire
d'un circuit spécialisé SAA1027.
L'utilisation du circuit SAA1027 simplifie la programmation,
en prenant à sa charge la commande des 4 phases du
moteur.
Une fourche optique est prévue
pour le recalage périodique de la position zéro
du moteur.
|