Nous avons utilisé un moteur
4 phases de 400 pas/tr.
La rotation d'un pas correspond dans ce cas à 0.9°
(très proche de 1°).
Le sonar tournera de 162° pour 180 pas.
Ce défaut, inhérent au choix d'un moteur pas-à-pas,
s'avère tout à fait acceptable pour la représentation
graphique.
Un moteur pas-à-pas de 200 pas/tr pourrait convenir
à condition de le commander en demi-pas, ce qui est
toujours possible, mais moins simple.
La tension d'alimentation du moteur
est ici de 12V.
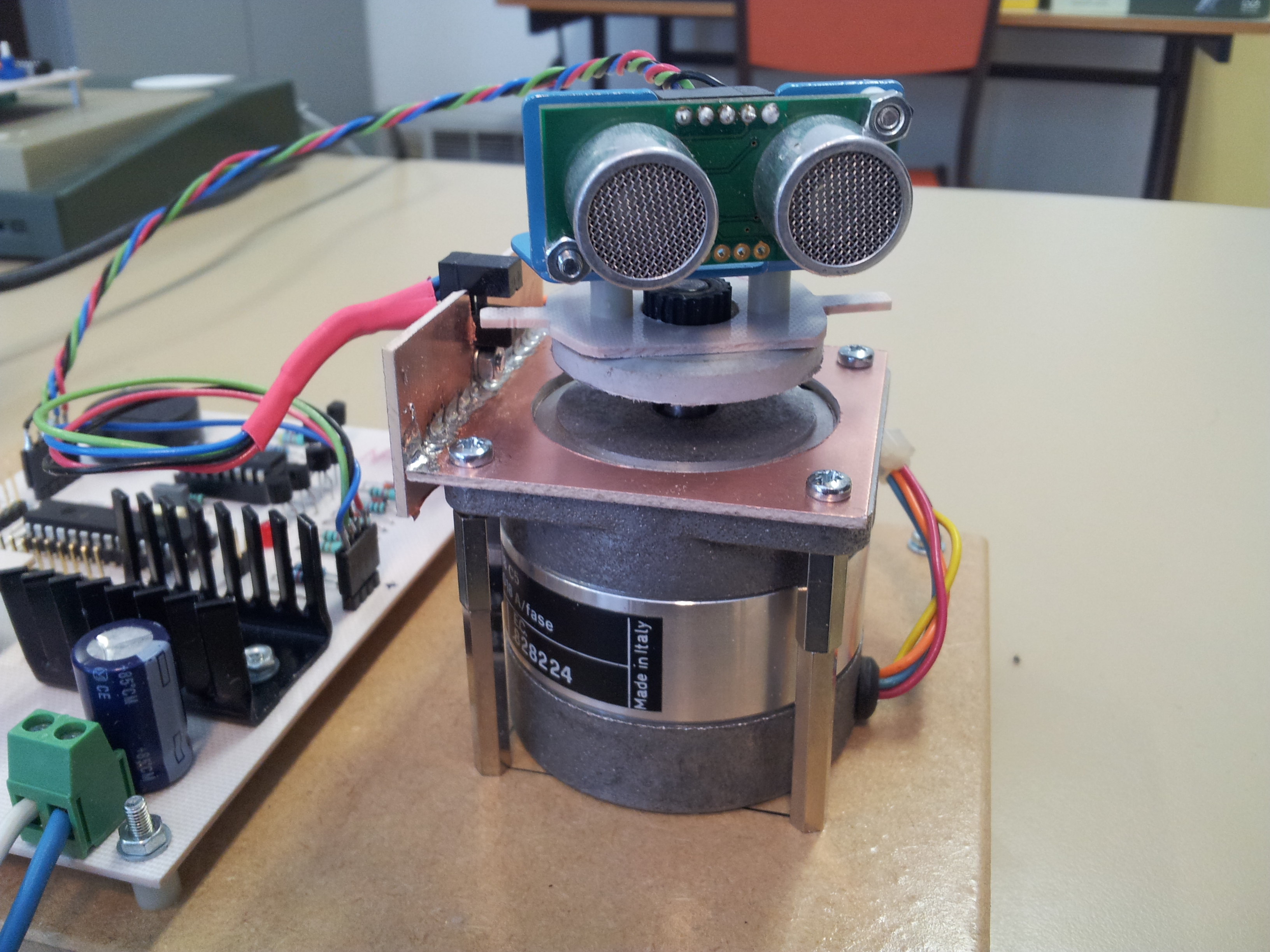
Le choix d'un moteur pas-à-pas
est une solution simple mécaniquement.
Il évite l'utilisation d'un codeur angulaire associé
à un moteur réducté.
En contrepartie, il introduit une petite erreur sur l'angle
de rotation et
est relativement lourd, ce qui peut poser problème
si il est monté sur un petit robot mobile.