|
Le principe de mesure
est appelé "écholocation
".
Il est utilisé de façon intuitive par la chauve-souris
(dans l'air) ou le dauphin (dans l'eau) depuis des milliers
d'années.
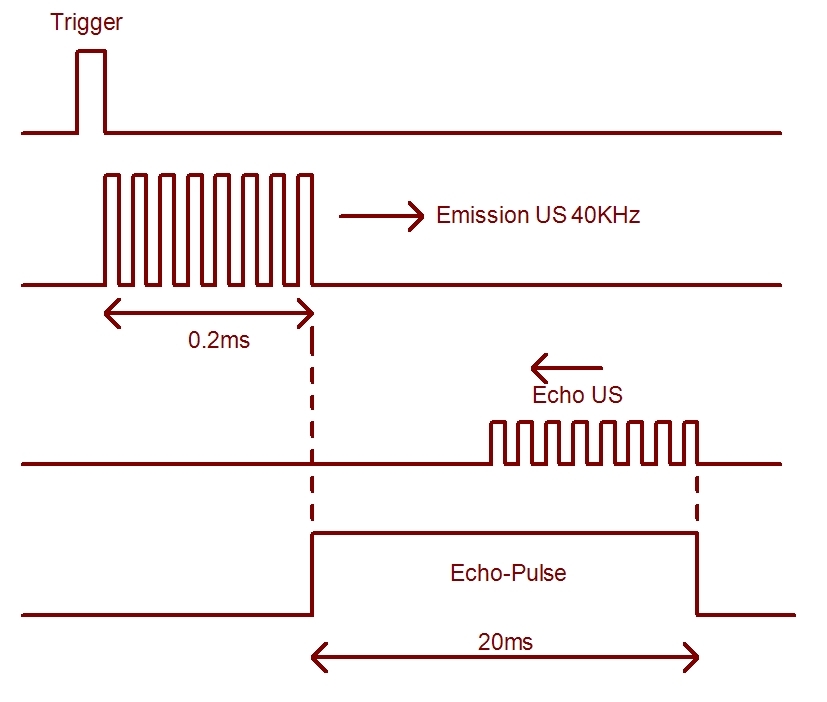
Il consiste à émettre une impulsion ultrasonore
(40KHz) et à écouter l'écho généré
par un obstacle.
Le temps que met l'écho pour revenir à la source
de l'émission, détermine la distance de l'obstacle.
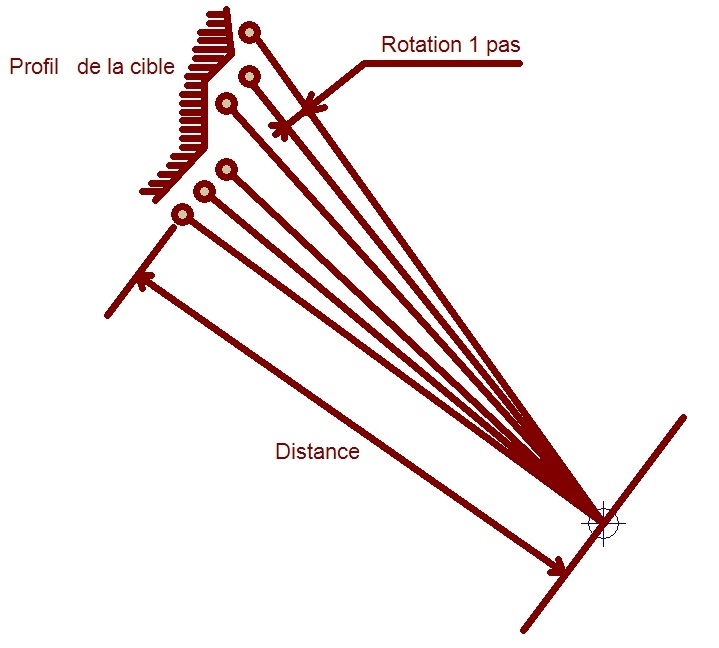
Si cette mesure est faite
sous différents angles, on obtient une image acoustique
de l'environnement.
|