-
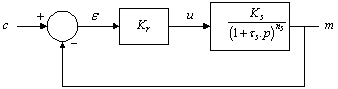
Méthode de Strejc (boucle fermée)
Schéma de la boucle fermée
L’opérateur fait varier l’action proportionnelle du
régulateur

jusqu’à la limite de
stabilité de la boucle (

connu
par un essai statique en boucle ouverte).
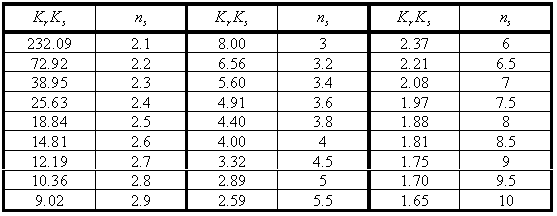
Les deux relations suivantes conduisent à la détermination
des paramètres du modèle de Strejc :
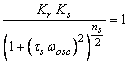
et

d’où
(
Tableau
ci-dessous) puis
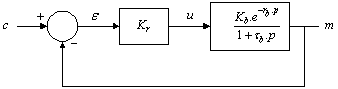
- Méthode de Broïda (boucle fermée)
Schéma de la boucle fermée
Après avoir déterminé

connu par un essai
statique en boucle ouverte, l’opérateur relève le gain
et la période

qui conduit à la
limite de stabilité.
Les paramètres du modèle de Broïda se déduisent des
relations suivantes :
et
: Les méthodes d’identification en
boucle fermée présentées peuvent compte tenu de la recherche du gain limite de
stabilité, engendrer des phénomènes non linéaires (saturation par exemple). Il
peut être intéressant d’utiliser une méthode basée sur la recherche d’un cycle
limite avec un relais à la place de l’amplification régulateur.