|
La correction P.I.D. est l'association d'une correction P.I. (paragraphe 7.2.1) et d'une correction P.D. (paragraphe 7.3)
D'ailleurs, la fonction de transfert du correcteur P.I.D. de type série correspond au produit des fonctions de transfert du correcteur P.I. et du correcteur P.D.:
R(p) = K[1 + 1/(Tip)][1 + (Tdp)/(1 + tdp)]
= [K(1 + Tip)(1 + Tap)] / [Tip(1 + bTap)]
avec td = b.Ta et Ta = Td + td.
Transmittance harmonique:
R(jw) = [K(1 + jwTi)(1 + jwTa)] / [(jwTi)(1 + jbwTa)]
çR(jw)ç = [K(1 + w2Ti2)1/2 (1 + w2Ta2)1/2] / [wTi(1 + w2b2Ta2)1/2]
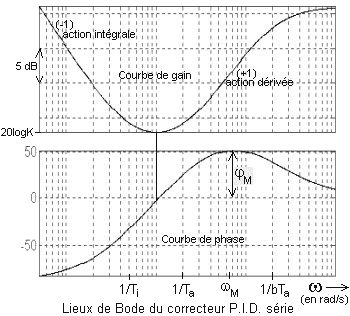
^R(jw) = - 90° + arctan(wTi) + arctan(wTa) - arctan(wbTa)
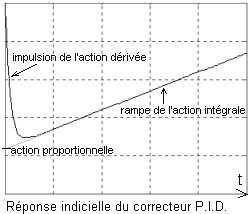
Les lieux de Bode de R(jw) et la réponse indicielle du correcteur seul sont représentés ci-contre:
Si on associe les deux critères de réglage vus précédemment, on obtient les améliorations cumulées des deux corrections P.I. et P.D.
| 
 |
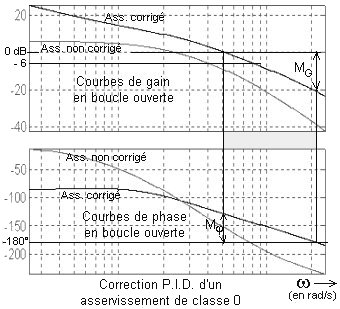
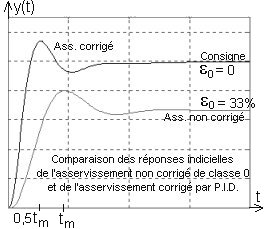
Exemple d'un asservissement non corrigé de classe 0, puis corrigé par P.I.D. de type série:
L'asservissement non corrigé a une précision statique très mauvaise (erreur de position de 33%) et une vélocité médiocre. Grâce au correcteur P.I.D. l'erreur de position de l'asservissement corrigé est nulle (quelles que soient les perturbations), et la vélocité est deux fois meilleure (temps de montée divisé par 2).
Les lieux de Bode en boucle ouverte d'une part, et les réponses indicielles en boucle fermée d'autre part sont représentés ci-dessous.
Le correcteur P.I.D. de type parallèle a une fonction de transfert différente mais qui, après factorisation, peut se ramener à la forme du P.I.D. série. Les conclusions sont donc identiques. Nous étudierons, dans les paragraphes suivants, plus spécialement le correcteur P.I.D. de type parallèle qui est le plus utilisé.