But de la correction
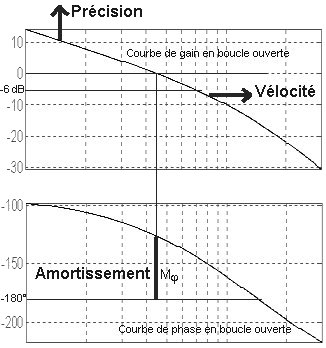 Les trois qualités d'un asservissement sont: la précision, la vélocité et l'amortissement. Les lieux de Bode de T(jw) en boucle ouverte (ci-contre) permettent de bien comprendre le but de la correction:
Les trois qualités d'un asservissement sont: la précision, la vélocité et l'amortissement. Les lieux de Bode de T(jw) en boucle ouverte (ci-contre) permettent de bien comprendre le but de la correction:
. Pour améliorer la précision (voir tableau des erreurs statiques au paragraphe 6.5.4) il faut, pour une classe donnée, remonter la courbe de gain dans le domaine des basses pulsations (augmenter le gain en position ou en vitesse).
. Pour améliorer la vélocité (voir le paragraphe 6.6) il faut augmenter la pulsation w-6BO donc tirer la courbe de gain vers la droite.
Nous voyons bien qu'il n'y a aucune incompatibilité entre ces deux premières qualités car si on relève l'ensemble de la courbe de gain on améliore ensemble la précision et la vélocité. Malheureusement il y a l'amortissement de la boucle qui est une qualité essentielle.
Pour avoir un bon amortissement il faut une bonne marge de phase Mj (voir les lieux de Bode du paragraphe 6.3).
Et là nous voyons bien que c'est incompatible avec une translation vers le haut de la courbe de gain en boucle ouverte. Il y a donc toujours dans une boucle d'asservissement un dilemme entre le couple de qualités précision-vélocité et la qualité amortissement (qualité indispensable).
On peut donc en déduire que le but de la correction est de remonter la courbe de gain (en boucle ouverte) dans le domaine des basses pulsations et de tirer cette courbe de gain vers la droite dans le domaine des hautes pulsations, tout en conservant des marges de stabilité satisfaisantes (c'est là qu'intervient la courbe de phase !).
Nous allons, dans les paragraphes suivants, étudier la fonction de transfert des principaux correcteurs et la modification des lieux de Bode en boucle ouverte apportée par la mise en place du correcteur.
