|
|
|
|
2.5. La détection d'obstacle ultasonore
Supposons
un signal ultrasonore (US) composé
de trains d'ondes à la fréquence F=40KHz.
Ces trains d'ondes se propagent dans l'air à la vitesse c = 340m/s
et rencontrent une cible en mouvement à la vitesse v.
Une partie de l'énergie émise est absorbée par la cible et
une autre partie renvoyée sous forme d'écho vers l'émetteur.
Le temps
Tr que met l'onde pour aller et revenir de la cible
permet de calculer la distance émetteur/cible
Indépendamment de la nature de la cible (bois, métal...)
d = c.Tr/2


C'est l'effet Doppler.
L'intensité sonore diminue de façon exponentielle avec la distance.
L'amplitude de l'écho E dépend donc
de la distance émetteur/cible et du matériau
constituant la cible.
La période de répétition To détermine
la PRF (Pulse Repetitive Frequency)
Voir
ressource en ligne:
Effet Doppler: Applications en
télédétection
(Radar - Sonar - Echographie) |
|
L'objectif
de ce montage n'est pas de mesurer une distance précise
en calculant le temps de parcours d'un train d'ondes US,
mais simplement de détecter la présence d'un objet
situé à une "courte distance" de l'émetteur.
Un signal ultrasonore est envoyé en permanence
à l'aide d'un transducteur émetteur 40KHz.
Le signal écho est capté par un transducteur récepteur et amplifié.
La détection est active lorsque l'amplitude E de ce signal
atteint un certain seuil.
Ce phénomène d'écho est fonction de plusieurs facteurs:
- la quantité d'énergie émise
- la faculté qu'a la cible d'absorber l'onde émise
( échogénicité -> dépend du matériau)
- la distance qui sépare l'émetteur de la cible
- le milieu dans lequel se propage l'onde (air, eau ...)
La distance maximale de détection sera donc fonction du type
de matériau constituant la cible.
Du bois ou du tissus, absorbe davantage les ultrasons que des matériaux durs comme
l'acier ou la pierre. |
|
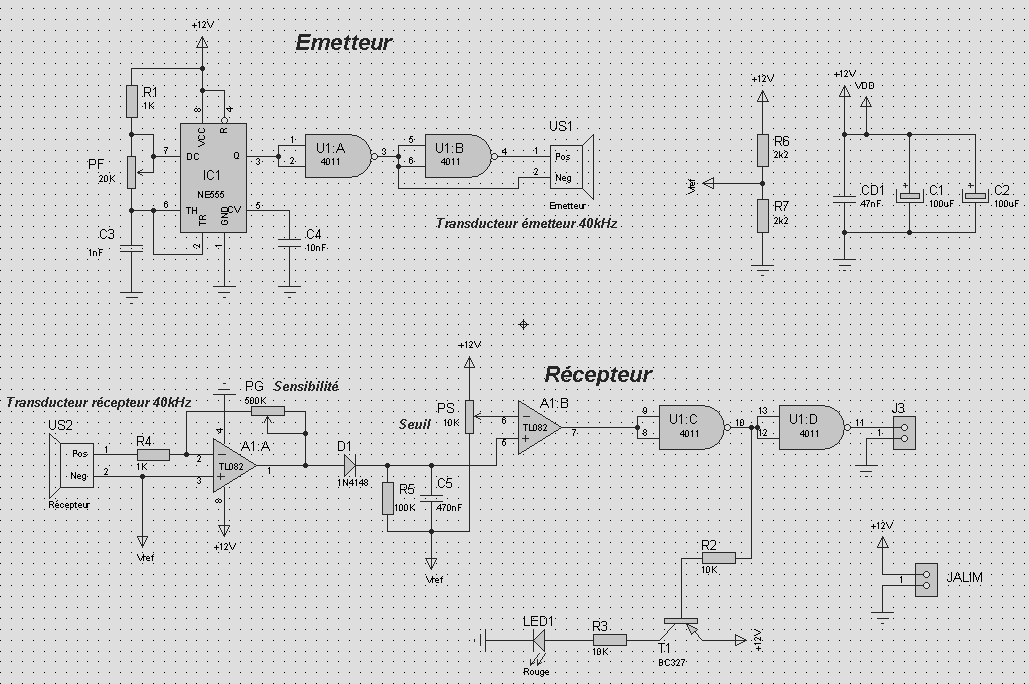
L'émetteur US:
Un timer NE555, monté en astable, génère un signal rectangulaire d'amplitude 12V et de
fréquence 40KHz
Cette fréquence est réglable par l'ajustable PF ( multitour ). Le réglage doit être
précis.
Les deux portes Nand CMOS 4011 génèrent deux signaux rectangulaires de même fréquence
mais en opposition de phase.
L'amplitude crête des signaux appliqués au transducteur émetteur est donc de 24V
Ceci est dû à l'effet capacitif de ce transducteur.
|
|
Le récepteur US:
Le transducteur récepteur capte un éventuel écho à 40KHz.
Le signal issu de ce capteur est amplifié à l'aide de l'AOP A1:A
Le gain de cet étage est réglable par PG ( multitour ).
Une référence de tension symétrique (6V) est créée à l'aide du pont de résistances
R6,R7 .
A la fréquence 40KHz et compte tenu du gain important souhaité,
l'ampli OP se comporte comme un filtre passe-bas.
Du signal rectangulaire de départ, ne subsiste que la fondamentale sinusoïdale.
L'amplitude de cette sinusoïde dépend de la distance émetteur/cible.
Cette sinusoïde est redressée et filtrée de façon à obtenir une tension continue,
dont l'amplitude change en fonction de la distance avec la cible.
Le comparateur A1:B va permettre de matérialiser une détection par un état 0 ou 1.
Cet état est de plus visualisé par une LED .
|
Il est nécessaire
de prévoir des condensateurs
de découplage sur les différents circuits intégrés.
Les deux transducteurs US
ne doivent pas se toucher.
(Typon: 5x6cm |
|
Si l'on ne souhaite pas développer un détecteur à ultrasons, il
existe sur le marché des modules sonars dédiés à ce type d'applications.
Ce Sonar utilise un module à ultrasons MSU04 disponible chez tous les fournisseurs de
matériels électroniques.
(Selectronic Ref: 50.0660-1 Prix: 33.50Euros) |

|
|

|
|
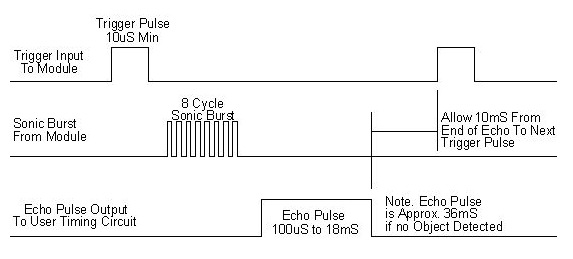
Il faudra dans ce cas developper une carte électronique
permettant d'effectuer les demandes de mesures et d'interpréter le signal écho. |
|
|
|
|
|
