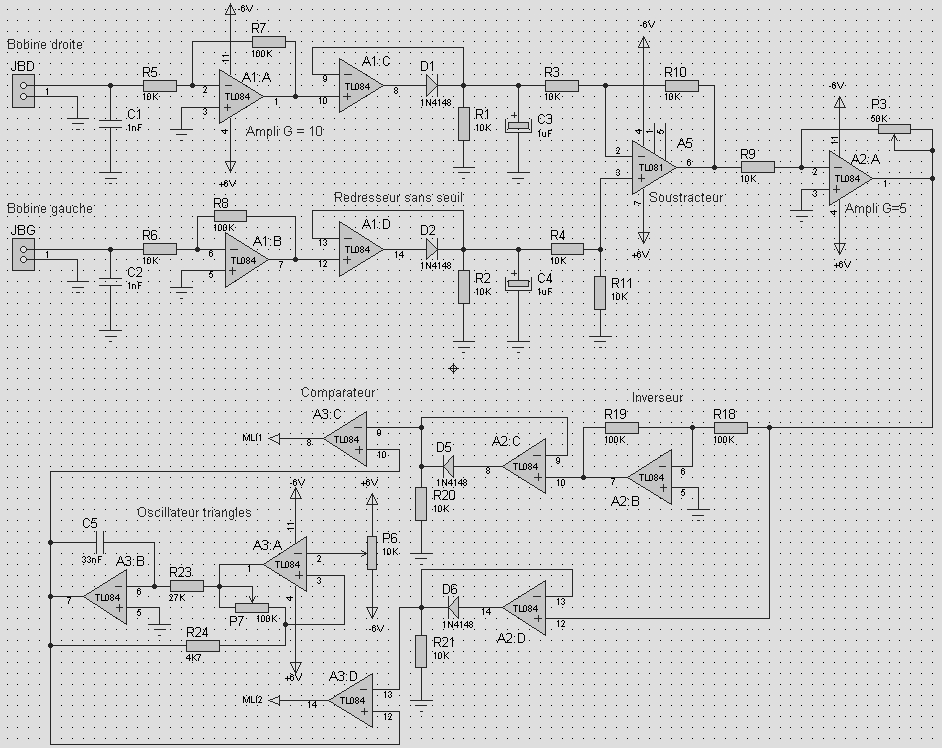
La
sortie de l'AOP A2:A est représentative de l'écart transversal du robot par
rapport l'axe du fil guide.
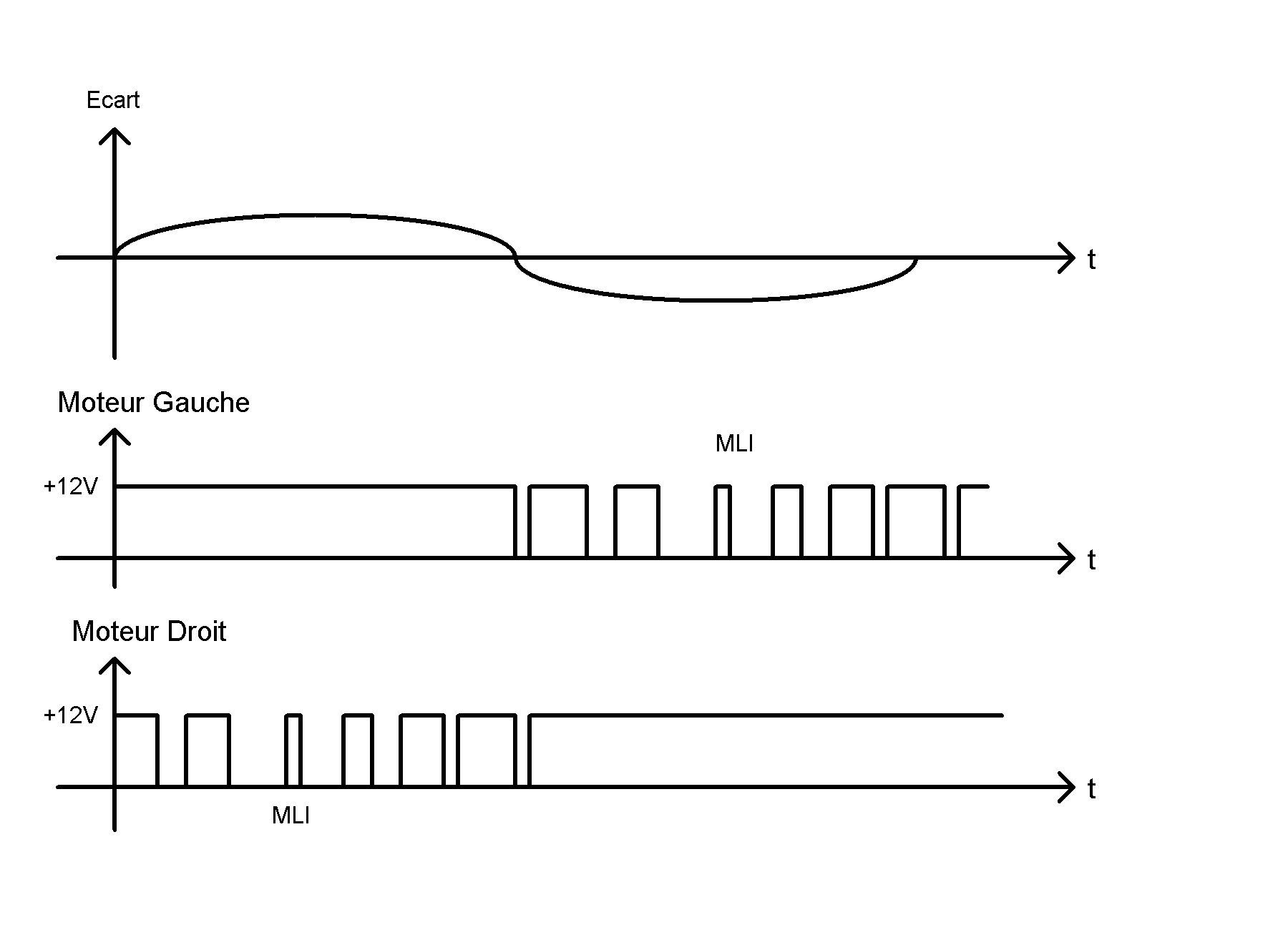
Le principe de guidage consiste à ralentir le moteur gauche lorsque le robot se décale
vers la droite du fil
et inversement, à ralentir le moteur droit lorsque le robot se décale vers la gauche.
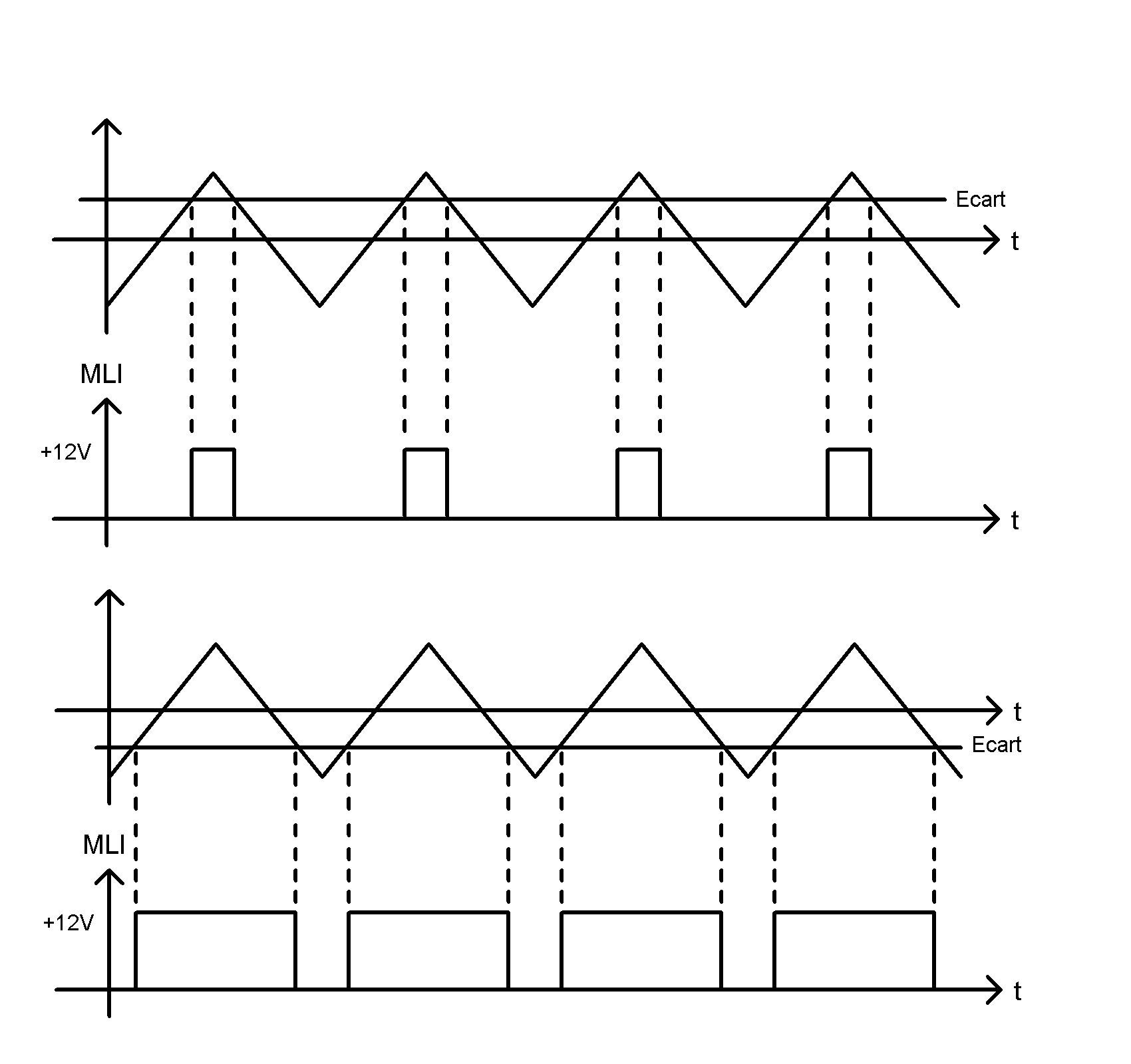
Le ralentissement d'un moteur est réalisé en appliquant à celui-ci un signal à rapport
cyclique variable MLI.
(MLI: Modulation en Largeur d'Impulsion).
Lorsque le rapport cyclique est proche de 100% la vitesse du moteur est maximale
et lorsque le rapport cyclique est proche de 0% la vitesse du moteur est proche de zéro.
Lorsque le robot est centré par rapport au fil guide (écart = 0) le rapport cyclique est
réglé à 90% pour les deux moteurs.
Cette particularité permet un meilleur asservissement de position et évite le
"pompage" du robot.
Dans ce cas, pour des petits décalages par rapport au fil, l'une des vitesses augmente
pendant que l'autre diminue.
L'amplitude du signal écart est réglée de telle manière, que le signal MLI du moteur
correspondant soit de 0% lorsque
le fil guide est à la verticale de l'extrémité extérieur du capteur.
|