Radar de
proximité à ultrasons
L'objectif
de ce montage n'est pas de mesurer une distance précise, en calculant le temps de
parcours d'un train d'ondes ultrasonores, mais simplement de détecter la présence d'un
objet situé à courte distance de l'émetteur.
Un
signal ultrasonore de fréquence 40kHz est émis en continu à l'aide d'un transducteur
émetteur (US1). Le signal écho est capté par le transducteur récepteur (US2) et
amplifié. La détection est active lorsque l'amplitude de l'écho atteint un seuil
défini par le potentiomètre PS.
Un
circuit timer NE555, monté en astable, génère un signal rectangulaire d'amplitude 12V
et de fréquence proche de 40kHz. Cette fréquence est ajustée par le potentiomètre PF
de façon précise sur la fréquence de résonance des transducteurs. Pour un gain donné,
le réglage de PF doit correspondre au maximum de tension (sinusoïdale) sur la sortie 1
de l'AOP A1:A.
Les deux portes NAND CMOS 4011 génèrent deux signaux de même
fréquence mais en opposition de phase. L'amplitude crête des signaux appliqués au
transducteur émetteur est donc de 24V. Ceci est dû à l'effet capacitif de ce
transducteur.
L'effet
capacitif des transducteurs ainsi que la largeur de bande de l'AOP, limite le spectre du
signal reçu à la seule harmonique fondamentale. Cette sinusoïde est redressée et
filtrée (D1,R5,C5). La tension continue ainsi obtenue, voit son amplitude bouger en
fonction de la proximité d'une éventuelle cible.
Le réglage de la distance de détection se fait en agissant sur
les deux potentiomètres PG et PS.
Une surface plane échogène sera détectée sans difficulté à
une distance de 50cm à 1m.
Pour des distances plus importantes, il faut ajouter un étage
amplificateur identique à A1:A entre celui-ci et la diode D1.
Ce montage peut être utilisé comme radar de recul pour voiture.
Cette méthode de détection, basée sur l'amplitude de l'écho, a l'avantage d'être
simple mais a néanmoins un défaut: des surfaces faiblement échogènes (tissus,
liège…) seront détectées plus tardivement que des surfaces fortement échogènes
(métal, pierre…).
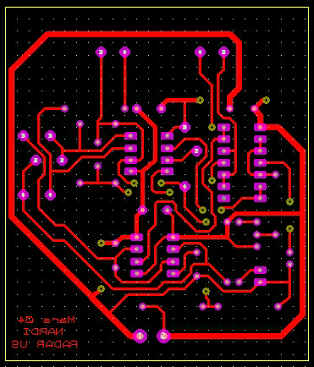
Face
"composants"
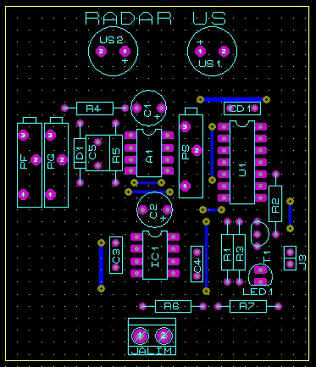
Face
"soudures"
Sonar
à ultrasons MSU04
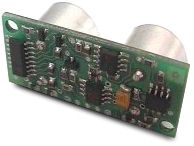
Ce petit module,
idéalement conçu pour les applications liées à la robotique ludique est capable de
déterminer la distance qui le sépare d'un obstacle se présentant devant lui (entre 3 cm
et 3 m).
Doté de deux
transducteurs ultrasonores (émetteur/récepteur), son principe de fonctionnement repose
sur celui des "sonars".

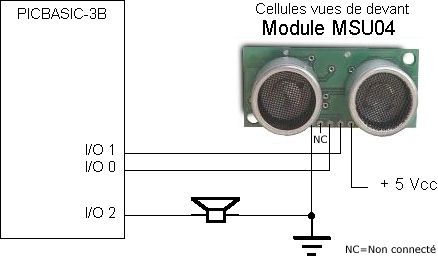
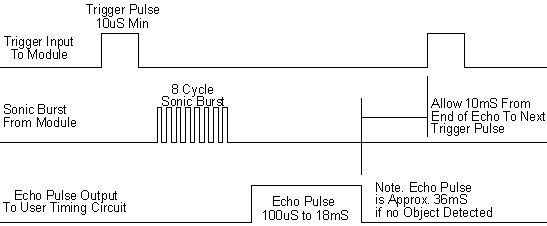
Il est doté d'une sortie
délivrant des impulsions dont la largeur comprise entre 100 µs et 18 ms est directement
proportionnelle avec la distance de l'obstacle qui est présent devant lui (voir schéma
ci-dessous). Il pourra par exemple être très facilement
interfacé avec la plupart des micro-contrôleurs (programmable en
assembleur, en langage "C", en Basic, Pascal...).
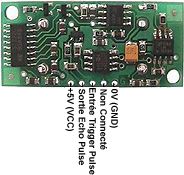
Caractéristiques
techniques:
- Alimentation: + 5 Vcc.
- Consommation: 30 à 50 mA env.
- Angle de détection: 55 ° env.
- Dimensions: 43 x 20 x 17 mm.
Chronogramme
des signaux
Diagramme
de directivité
Exemple
d'interfaçage