Située
à l'avant du robot, cette carte permet de visualiser l'état des capteurs.
Elle est indispensable pour la mise au point du robot.
Elle permet de s'assurer du bon fonctionnement des capteurs optiques et de leur
positionnement par rapport à la ligne.
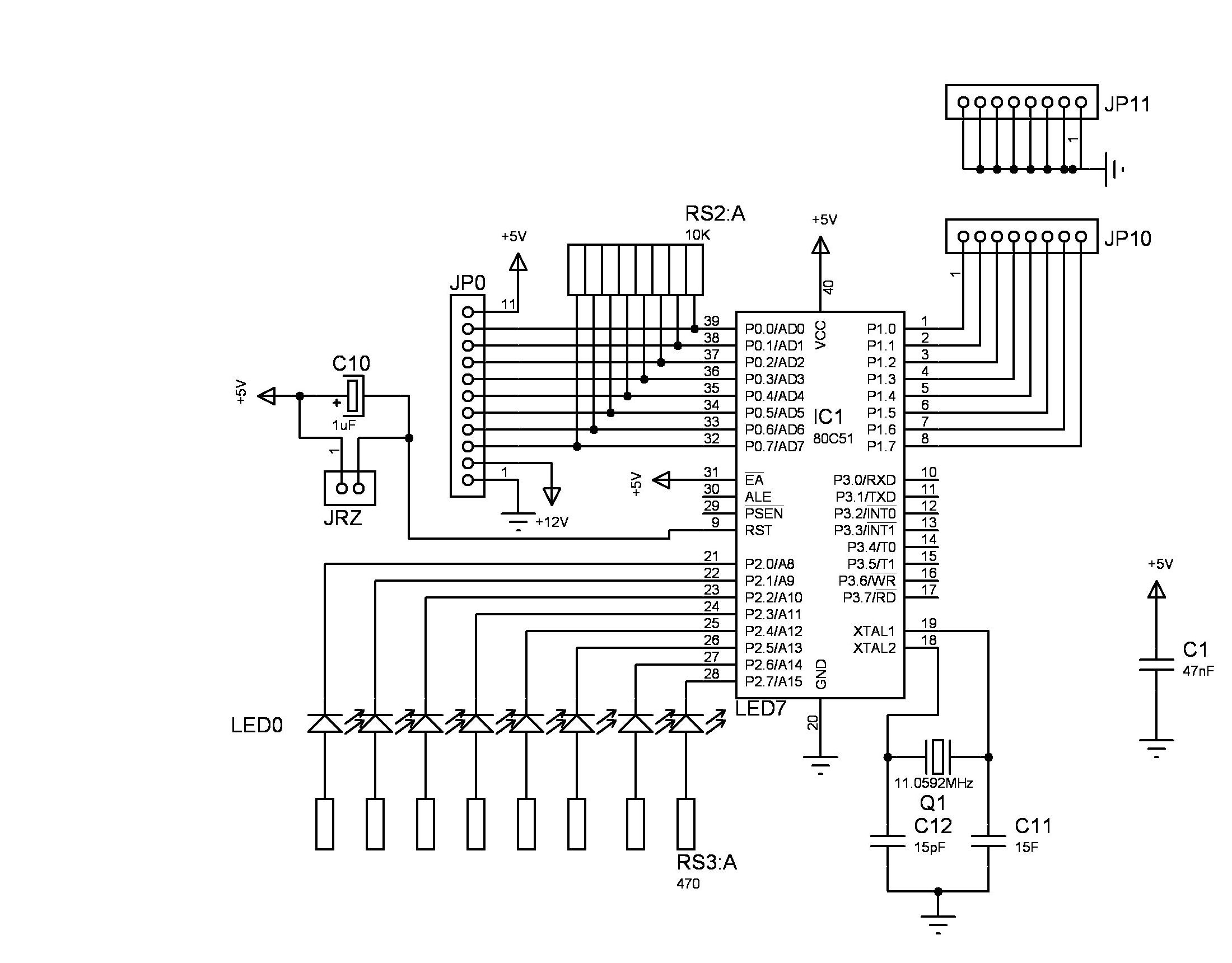
Le port P0 du microcontrôleur IC1 (80C51) reçoit les informations capteurs par
l'intermédiaire du connecteur JP0.
L'état des capteurs est recopié sur le port P2 qui pilote huit Leds d'affichage. |