La définition des
fonctions de transfert de chaque bloc de
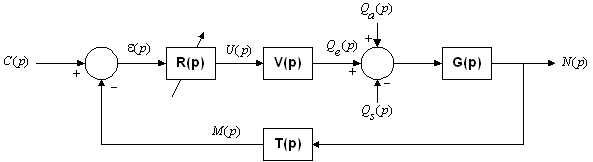
l’ensemble d’un procédé permet de construire
un schéma fonctionnel qui
formalise l’étude d’analyse et de synthèse de
la boucle. Un tel projet peut
être fait à la main ou en s’aidant d’outils
informatiques dédiés pour l’étude
et la simulation.
Le schéma TI de la
régulation de niveau du paragraphe 1.4 conduit au
schéma fonctionnel ci-dessous après avoir nommé
les différentes
fonctions de transfert des éléments du système.
Transfert
mesure niveau-consigne : 
Transfert
mesure niveau-débit sortie : 
Transfert
mesure niveau-débit recyclé : 
Remarques :
- Toutes les fonctions de transfert possèdent le même dénominateur
nommé équation caractéristique.
- La partie réglable
 intervient
dans l’équation caractéristique et a une incidence sur les pôles de ces
transferts.
intervient
dans l’équation caractéristique et a une incidence sur les pôles de ces
transferts.
- Le dénominateur (polynôme caractéristique) est un polynôme
construit à partir des zéros et des pôles de la boucle ouverte
- L’incidence du régulateur n’a
pas le même rôle vis à vis des perturbations et de la consigne.