Robot balayeur
Chapitre 1. Principe du robot balayeur
Chapitre 2. L'électronique
2.1. L'émetteur à ultrasons
2.2. Le récepteur à ultrasons
2.3. La carte commande des moteurs
2.4. Le programme du microcontrôleur
Chapitre 3. La mécanique
Chapitre 4. Conclusion
2.4. Le programme du microcontrôleur
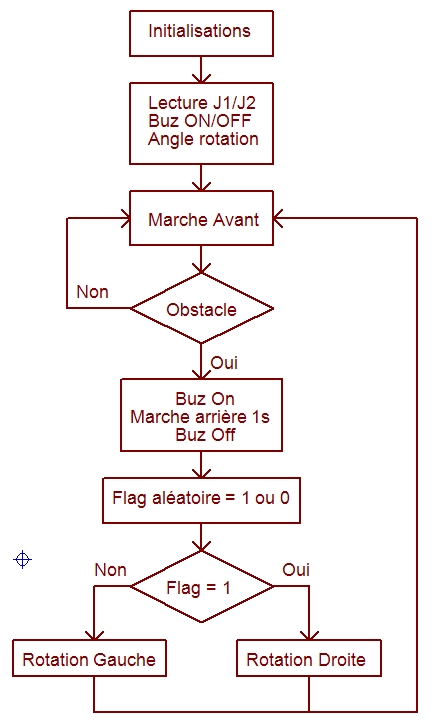
L'organigramme ci-dessous décrit le fonctionnement du robot lors de son déplacement.
Lors d'une détection d'obstacle, le robot active son buzzer et fait marche arrière pendant une seconde, avant de tourner de façon aléatoire à droite ou à gauche.
Télécharger le fichier source en C et le programme au format HEX