|
|
|
|
1.2. Numérisation d'un régulateur PID
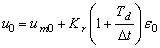
Forme du PID mixte non
filtré avec un talon de réglage  : :
Numérisation des actions avec un pas de calcul  : :
Notation : 
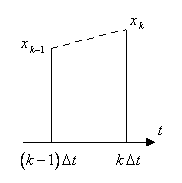
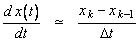
- Dérivation :
Différence
avant 
Différence arrière

Trapèze

Approximation d’Euler (intégration par différence avant) :
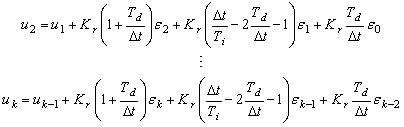
Détermination d’une forme incrémentale ou récurrente :
Conclusion : La programmation de cette équation récurrente
est très simple, la détermination des réglages du PID peut être faite à partir
des solutions exposées dans le module AU3. La seule chose fondamentale est
d’avoir une identité parfaite entre le pas de calcul matériel (timer qui
cadence le programme) et la valeur numérique du pas de calcul intervenant dans
la définition des coefficients de l’algorithme.
|
|
|
|
|